ミリ波レーダーセンサモジュール
一般にレーダー(RaDAR:Radio Detection And Ranging)とは、電磁波(電波)を目標物に発射し、それから反射した電波を測定することで、目標物までの距離と方位を検知する装置です。したがって、ミリ波レーダーとは、電波にミリ波を用いたレーダーという意味です。
ミリ波レーダーは、赤外線やカメラに比べて雨や雪、霧などといった悪天候下でも検知能力が低下せず、目標物までの距離や方位のほか、目標物の移動速度も検知することができます。このような特徴をもつミリ波レーダーについて、その検知原理や活用例、また将来性について紹介します。
ミリ波(“mmWave”とも記載されます)が電波の分類上、どの範囲にあるのかを図1に示します。一般的に、周波数が30GHzから300GHz、波長が1mmから10mmの電波のことを指し*1、波長がmm(ミリメートル)単位であることから「ミリ波」と呼ばれています。
*1 ミリ波の周波数範囲については、実は厳密な定義はありません。たとえば、5G通信で世界的に割り当てが進んでいる26GHz帯や28GHz帯もミリ波として扱っています。
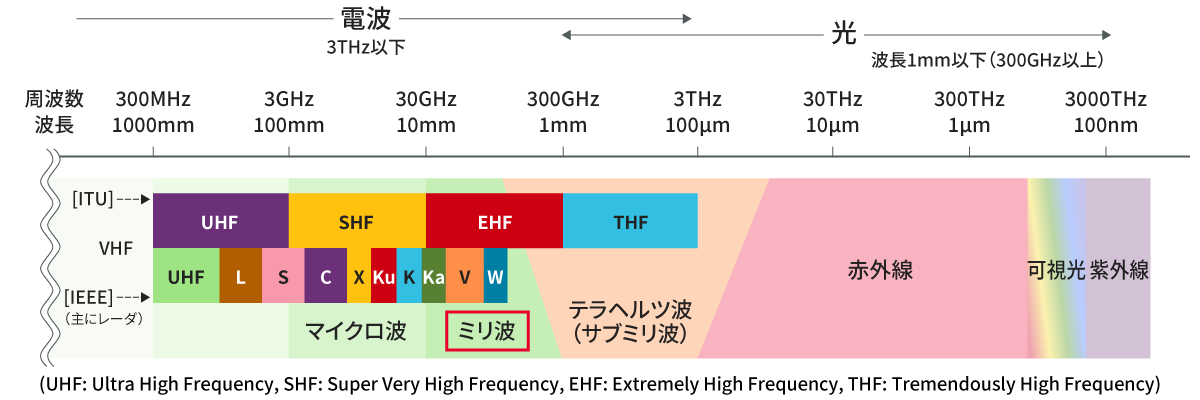
このミリ波には、強い直進性と周波数域幅を広く確保することが可能という特徴があります。表1にその特徴についてまとめました。
| 直進性 | 図1に示すように、ミリ波の周波数は光に近いことから光と同じく直進性が強く、そのため 以下のことが言えます。 a-1 壁などの物体による遮蔽や、極端な悪天候の場合での強度の減衰がある a-2 a-1から長距離通信には不向きである a-3 近距離の通信において、近くのミリ波システムとの干渉が起こりにくい a-4 布や樹脂などを透過性がある |
|---|---|
| 周波数帯域幅 | ミリ波帯は未開拓の領域であり、まだ需要が少ない周波数帯であるため、広い周波数帯域幅を 確保することが可能です。(現状、数GHzより低い周波数領域は、ほとんどが使われており、 帯域を確保するには電波法やビジネス上の制約があります。) |
レーダーでは、周波数帯域幅が広ければ距離の検知(2項参照)の精度の向上につながるため、周波数帯域幅は重要な仕様と言えます。なお、移動体通信などでは、周波数帯域幅が広ければ通信速度の高速化につながります(時間領域と周波数領域―デジタル通信の基礎)。
冒頭に触れたように、ミリ波レーダーは、ミリ波を目標物に発射し、目標物からの反射波を受信して対象物の位置を検知する装置であり、最大約300mの範囲の物体を検知することができます。
現在、利用できる小電力レーダーの周波数帯は24GHz帯*2、60GHz帯、76GHz帯、79GHz帯で、それぞれ技術的条件が規定されています。このうちミリ波帯(60GHz帯・76GHz帯・79GHz帯)は帯域幅が広いため、高精度な検知が可能です。
なお、ミリ波レーダーの方式としてパルス方式とFMCW方式*3が代表的です。これらの特徴を表2に示します。
パルス方式 | FMCW方式 |
|---|---|
数十ナノ秒から数マイクロ秒ときわめて幅の短いパルスを | 連続波を周波数変調した送信波*4を目標物に発射し、 |
*2 24GHz帯:24GHz帯に関しては波長が12.5mmであり、ミリ波で定義されている10mm~1mmに含まれないので、「準ミリ波」と呼ばれることがあります。
*3 FMCWはFrequency Modulated Continuous Waveの略で、周波数を変調した連続波を用いる方式を意味します。
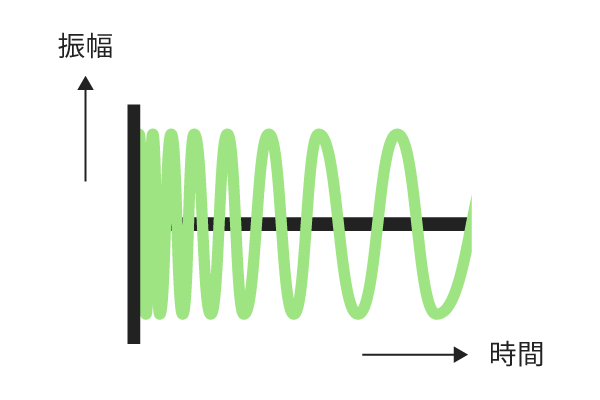
*4 FMCW方式の送信波のイメージを図3に示します。チャープ波形と呼ばれることがあります。
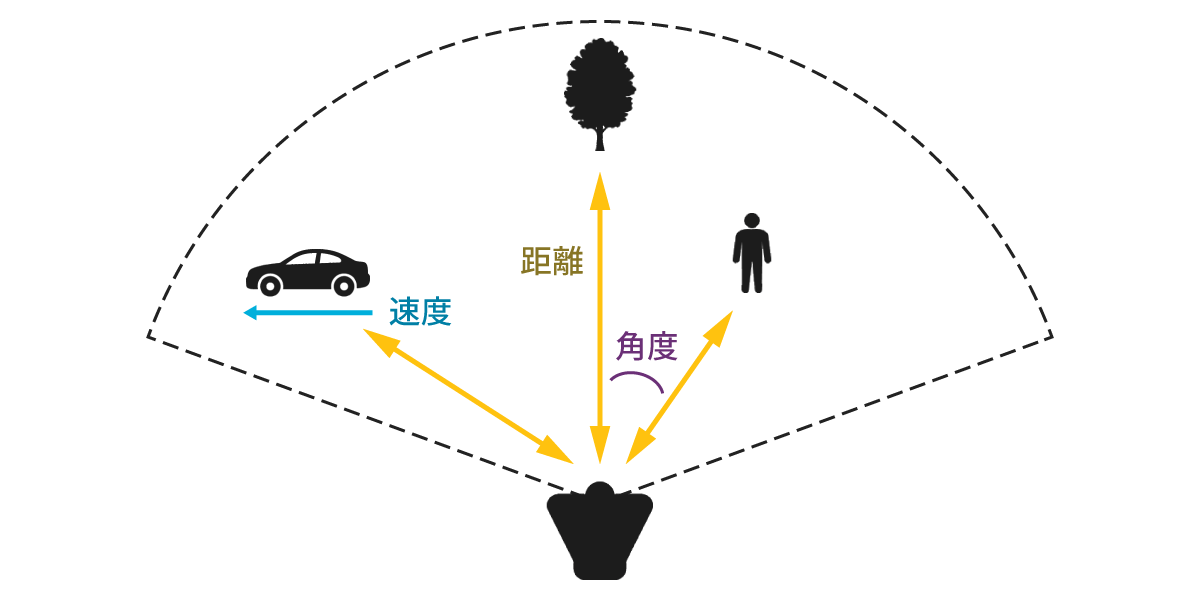
ミリ波レーダーには多くの方式がありますが、そのほとんどがFMCW方式の発展した方式です。そこで、FMCW方式のミリ波レーダーの構成と、対象物を検知するおおまかな原理を以下に説明します。シンプルな構成でありながら、距離・速度・角度という複合的な情報を取得できます。
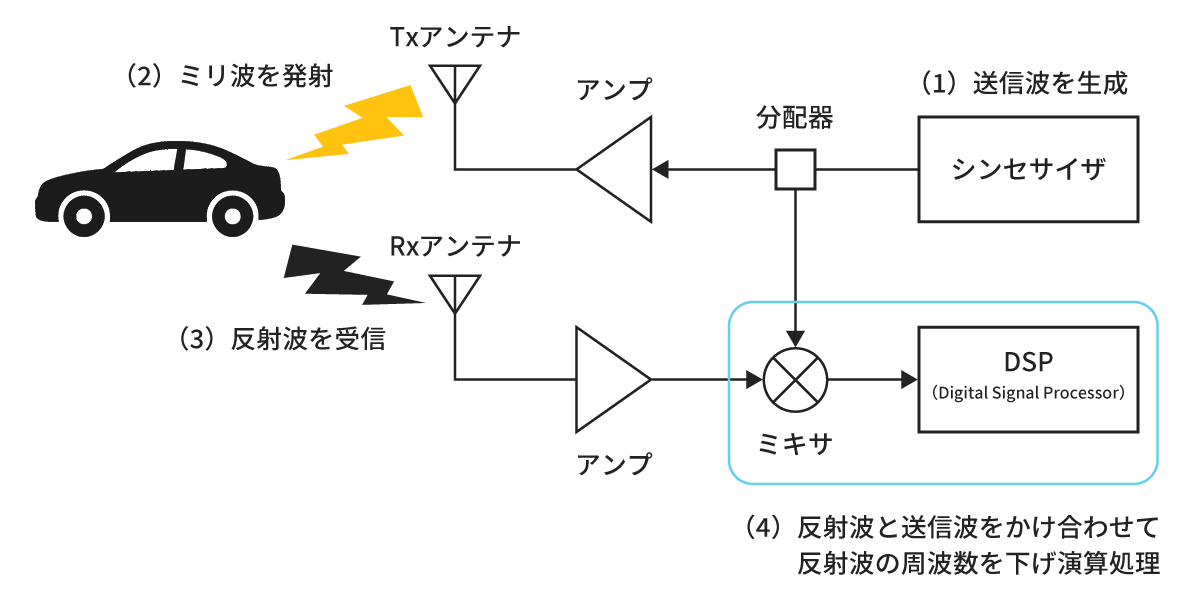
《ミリ波レーダーの構成》
シンセサイザ:送信するミリ波帯の電波(送信波)を生成する
Txアンテナ:送信波を発射する
Rxアンテナ:反射波を受信する
ミキサ:Tx信号とRx信号を組み合わせる
DSP(デジタル信号処理装置):演算処理を実施する
《検知の原理》
(1)送信波の生成:シンセサイザでミリ波帯域の送信波を生成します。
(2)ミリ波の発射:送信波をTxアンテナから目標物に連続して発射します。
(3)反射波の受信:目標物から戻ってきた反射波をRxアンテナで受信します。
(4)演算処理:送信波と反射波をミキサで組み合わせ、A/Dコンバータにてデジタル信号に変換してDSPにて演算処理することで、目標物の距離や速度、角度、速度などを求めます。
3項で説明したFMCW方式のミリ波レーダーは、多くの現場で活用されています。ここでは自動車・産業用ロボット・ドローンを例としてとりあげ、使用場面や貢献する機能について説明します(表3)。
| 用途 | 主な使用場面 | 使用周波数帯 | 検知内容 | 貢献する機能 |
|---|---|---|---|---|
| 自動車 | 車両周辺監視 (前方・後方・側方) 車内監視 | 76-81GHz帯 (車外) 60GHz帯 (車内) | ・障害物、他車両 ・ドライバー/ 乗員の状態 ・置き去り検知 | ・自動ブレーキ ・車線維持アシスト ・自動運転レベル2の実現に 貢献 ・安全性向上 |
| 産業用 ロボット | ロボットアーム AMR (自律走行搬送ロボット) | 主に60GHz帯/ 76-81GHz帯 | ・人や物体との距離 ・速度、角度 ・周囲の障害物 | ・人との接触回避 ・アーム動作の制御/停止 ・安全な自律走行 |
| ドローン | 有人地帯での飛行 | 主に60GHz帯/ 76-81GHz帯 | ・地面との距離 ・柱、壁 ・電線、ワイヤ、 アンテナ | ・天候の影響を受けにくい 障害物検知 ・有人地帯での安全飛行 |
自動車では、ミリ波レーダーによって車両周辺の障害物や他の車両を検知することで、自動ブレーキ、車線維持アシストなどの機能が実現でき、自動運転レベル2(部分運転自動化)を実現するためにはミリ波レーダーは不可欠と言われています。さらにドライバーや乗員の状態、置き去りの監視は安全性を高める上でも欠かせない機能として注目されています。
産業用ロボットのアームにミリ波レーダーを備えることで、アームと人や物体との距離、さらに速度や角度データを検知し、アームの動作を止めるといった決められた動作を起こせるようになります。また、たとえばAMR(Autonomous Mobile Robot:自律走行搬送ロボット)では棚や壁、人間やさまざまな産業機器などの障害物を避けて走行することが可能になります。
ドローン、とくに有人地帯を飛行するドローンには、高いレベルの安全性が求められます。ミリ波レーダーを使用して飛行進路を探知することで、天候状況に関わらず地面からの距離や柱・壁はもちろん、電力線や電話線、空中に張ったアンテナのワイヤなどを検知できるようになり、有人地帯での安全飛行が可能になります。

さまざまな分野で活用されているミリ波レーダーですが、近年、欧州で自動車の安全性能評価を手掛けるEuro NCAP*5が衝突安全試験の強化を打ち出したことから、車内の安全性を高めるシステムである「キャビンモニタリングシステム」へのミリ波レーダーの活用が注目されています。
*5 Euro NCAP:European New Car Assessment Programme(欧州新車評価プログラム)の略称。欧州で販売される新車の安全性を評価・公表する独立機関。衝突安全性や歩行者保などの先進安全技術を試験で格付けし、消費者の車選びの指標となっている。なお、NCAPは各国に存在し、米国ではIHS rating、日本ではJNCAPがある。
2023年、Euro NCAPは新たな評価項目を発表しました。エアバッグを乗員の体格に合わせて作動させる技術や、シートベルトの装着状況の検知に加え、近年増えている「車内の子どもの置き去りによる熱中症事故」を防ぐため、子どもの置き去り検知機能が評価対象に加わりました。これらを満たすには、車内の状態を把握するキャビンモニタリングシステムが不可欠とされています。
キャビンモニタリングシステムは、車内のセンサでドライバーや乗員の状態を監視し、必要に応じてブレーキやアラームを作動させる仕組みです。ドライバーの体調や集中力を確認するDMS(Driver Monitoring System)と、乗員の位置や動きを把握するOMS(Occupant Monitoring System)で構成されます。センサにはカメラが広く使われてきましたが、後ろ向きのチャイルドシートの赤ちゃんや、毛布にくるまった乗員、シートベルトの装着状況など、カメラだけでは検知が難しいケースも少なくありません。
こうした状況でカメラを補完・代替する装置(センサ)として、ミリ波レーダーが有力視されています。ミリ波レーダーは布や座席の裏側にも透過できるため、「カメラでは見えない対象」の検知が可能です。また、微小な動きも捉えられるため、心拍や呼吸といった生体のわずかな変化も検知できます。これらの特徴により、ミリ波レーダーはキャビンモニタリングシステムのDMS・OMSの機能向上に大きく貢献し、Euro NCAPが求める新しい安全基準への対応を後押しすると予想されます。
ミリ波レーダーは優れた検知能力をもつ装置―センサですが、今後求められる多様な検知に対応するためには、ミリ波レーダーを含め超音波センサ・赤外線センサ・カメラなど複数のセンサと組み合わせる「センサフュージョン」が重要になります。
センサフュージョンとは、複数のセンサのデータを統合し、単一センサでは得られない情報を取得する技術です。たとえばミリ波レーダーと画像センサを組み合わせることで、人の動きだけでなく目の動きや表情からドライバーの疲労・集中状態の情報を取得し、必要に応じてアラートを発することができます。
将来的には、自動車だけでなく、産業用ロボット、ドローン、各種モビリティにおいても、ミリ波レーダーを主軸としたセンサフュージョンが周辺状況の認識精度・安全性・信頼性を大きく向上させる技術として期待されています。