アンテナコイル


海洋は、漁業、海運、海洋資源開発、港湾インフラ整備など多岐にわたる産業活動の基盤となっています。これらの分野では水中作業を担う人材の確保が課題となっており、特に深水域や水流の速い現場での潜水業務には、高度な潜水技術を有する熟練人材が必要です。しかしその人材の維持・育成は困難であり、作業効率や安全性の向上が求められています。
今後、漁業や海運・海洋インフラの発展においてIT技術を駆使した生産性の向上が不可欠であり、水中ドローンは人手不足を解消し、危険な現場での作業を人に代わって行う技術として期待されています。ここでは、水中ドローンのなかでも近年注目されているAUVの基礎知識を中心に、水中における通信方法、測位・測距技術について解説します。
「水中ドローン」とは潜航可能な小型無人潜水機の通称です。船上や陸上から遠隔操作または自律運行することができ、小型カメラを搭載することで、撮影した映像をリアルタイムで確認できます。また、ロボットアームなどのマニピュレータを取り付けると、多種多様な作業を行うことができます。このため、水中での作業を人に代わって行うことが期待されています。

水中ドローンにはAUV(Autonomous Underwater Vehicle)とROV(Remotely Operated Vehicle)があります。
AUVは「自律型無人潜水機」といわれ、あらかじめプログラムされたとおりにドローン本体が運行・動作し、AUVと水上との通信は無線によって行われます。電源や通信に使用するケーブルはなく、電源はバッテリー、通信は無線で行います。ケーブルの長さによる運行範囲の制限やケーブルが絡まるといったトラブルがないため、広範囲かつ大深度での作業に複数台での活用が期待されています。
一方ROVは「遠隔操作型無人潜水機」ともいわれ、ドローン本体とコントローラがケーブルで接続されていて、人が水上からドローンを操縦します。ケーブルからの電源供給が可能なので、長時間の運行が可能です。またケーブルを通じた高速通信も可能で、産業用からホビー用まで幅広く普及しています。しかし、ケーブルの長さによる行動範囲の制限や、給電装置などを乗せる船舶が必要です。さらに複数台を同時に運行した場合は、ケーブルが絡まるといったトラブルにも注意が必要とされています。
これらからROVのデメリットを解決する水中ドローンとして、AUVには大きな期待が寄せられています。
AUVに搭載されたカメラや各種センサからのデータを受け取るには地上設備や船舶との通信が欠かせません。また、ケーブルを持たないAUVの場合、データの送受信は無線で行う必要があります。しかし水中は無線電波の伝搬が困難であるため、これまでは有線方式が主流であり、AUVを実用化するにあたっての大きな課題でした。近年では、水中でも無線通信可能な音響通信や光通信の開発が進んでいます。さらに目的地近辺における近距離での正確な測位・測距に対しては、LFアンテナを用いた通信技術に期待が寄せられています。
音波を使って通信します。水中での無線通信を行うことができ長距離通信が可能です。ただし周波数帯域が狭いため通信容量が小さく、画像や動画などの大容量データの高速通信には適していません。
1Gbpsクラスの高速通信が可能であり動画のストリーミング、高解像度の画像・動画の転送が実現できるとされています。一方で、水中の滞留物や汚濁により光が遮られると通信が不安定になる場合があります。
磁界を使った送受信による通信です。通信距離は数メートルと短距離ですが、磁界であるため水による減衰や汚濁などの障害物の影響を受けにくく、高い精度での測位・測距が必要なシーンでの活用が期待されています。
音波や光による通信、磁界による通信などいずれの方式にも長所と短所がありますが、現在はそれぞれの長所を生かし組み合わせての活用が試みられています。さらに水中での作業は高度化しつつあり、より高精度な測位・測距技術が求められています。以下では、LFアンテナの基礎知識と、AUVでのLFアンテナの活用例を紹介します。
LFアンテナは磁界を用いた通信であり、すでに自動車のスマートキーなどでは多く用いられています。送信アンテナと受信アンテナで構成されており、送信アンテナが発した磁界を受信アンテナが受け、信号強度(磁界の強さ)から受信アンテナの位置を測定します。
通信可能距離は数メートルと短距離ですが、送信アンテナを目的地周辺に一定間隔で設置することで、広範囲の測位・測距が可能です。また、誤差は数cmと高精度です。磁界は反射や回折の影響が少なく、障害物による減衰もありません。さらに水中の汚濁の中でも減衰しないため、作業位置近辺などでのAUVの誘導に活用できることが期待されています。
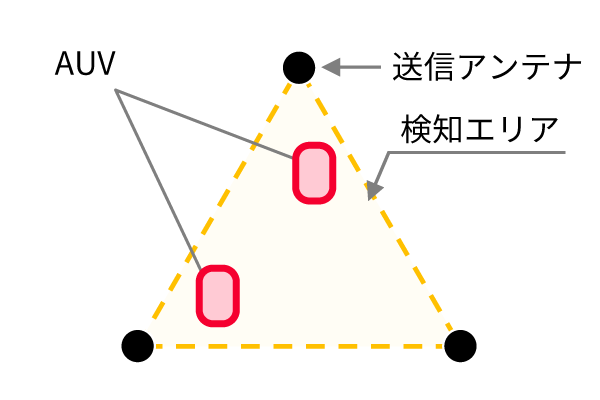
上記のような特徴を持つLFアンテナの、AUVでの活用例を以下に示します。
AUVは、これまで人が行ってきた水中での作業を代わって行う装置であり、水中作業に伴うさまざまな課題の解消に大きく貢献することができます。なかでも、海洋という産業活動の基盤においてAUVは、以下のような分野での水中作業が期待されています。
これらを実現するためにはAUVの安全な運行と正確な誘導技術が必要であり、それには水中通信技術の向上が不可欠です。音響・光・磁界を用いたLFアンテナなどの通信方法を組み合わせ、最適な水中無線システムを構築することは、今後のAUVの実用化や産業化に大きく貢献する技術であると期待されています。