mmWave Radar Sensor Modules
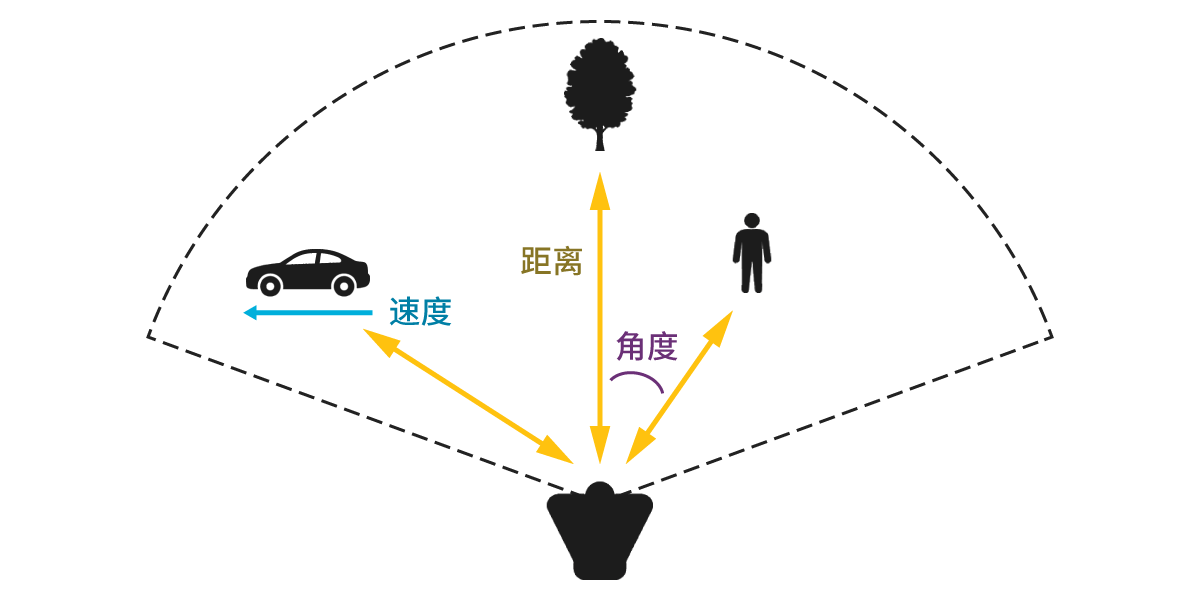
一般来说,雷达(RaDAR:Radio Detection And Ranging)是一种通过向目标物体发射电磁波(电波)并测量从目标物体反射回来的电波来检测与目标物体之间的距离和方位的装置。因此,毫米波雷达是指使用毫米波作为电波的雷达。
与红外线和摄像头相比,毫米波雷达即使在雨、雪、雾等恶劣天气条件下也能保持检测能力,不仅可以检测与目标物体之间的距离和方位,还能检测目标物体的移动速度。本文将对具有此类特征的毫米波雷达的检测原理、应用事例及其未来发展潜力进行相关介绍。
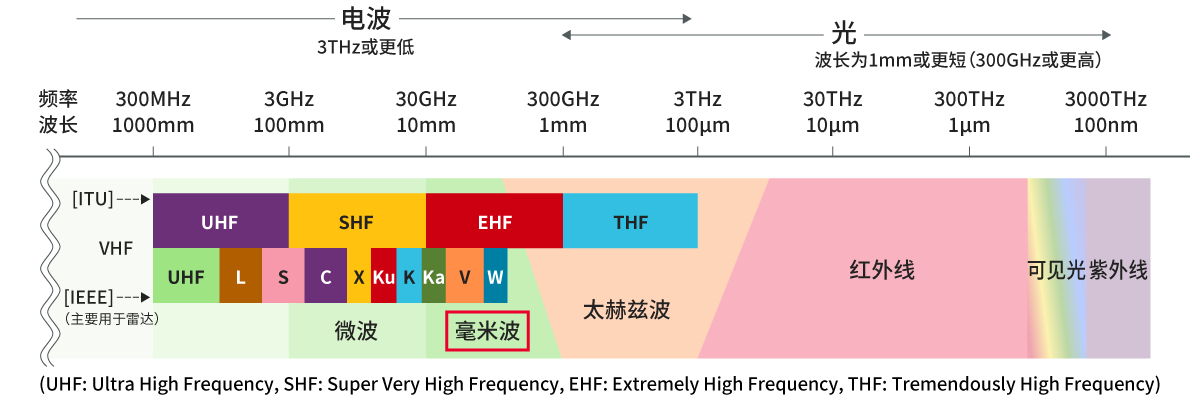
图1显示了毫米波(也写作“mmWave”)在电波分类中所处的范围。一般来说,它指的是频率在30GHz到300GHz之间、波长在1mm到10mm之间的电波*1,之所以称为“毫米波”,是因为其波长以mm(毫米)为单位。
*1 实际上,毫米波的频率范围并没有严格的定义。例如,目前全球分配给5G通信的26GHz频带和28GHz频带也被视为毫米波。
毫米波具有强直线传播性和可以确保宽频带宽的特征。表1对这些特征进行了总结。
| 直线传播性 | 如图1所示,由于毫米波的频率接近光的频率,因此它像光一样具有很强的直线传播性,由此可以得出 以下结论: a-1 由于墙壁等物体的遮蔽以及非常恶劣天气的影响,毫米波的强度会衰减 a-2 由于a-1的原因,毫米波不适合远距离通信 a-3 在短距离通信中,毫米波与近处的毫米波系统之间不容易发生干扰 a-4 可以穿透布料和树脂等 |
|---|---|
| 频带宽 | 毫米波频带是一个尚未开发的领域,且是一个需求量很少的频带,因此可以确保较宽的频带宽。 (目前,比GHz更低的频率范围基本上都已被使用,确保带宽会受到电波法和商业因素的限制。) |
在雷达中,增加频带宽有助于提高距离检测(参照第2项)的精度,因此可以说频带宽是一项重要的规格。另外,在移动通信等当中,增加频带宽有助于实现通信速度的高速化(“时域与频域―数字通信的基础”)。
如前所述,毫米波雷达向目标物体发射毫米波,并接收来自目标物体的反射波以检测对象物体位置的装置,能检测的上限为大约300m范围内的物体。
目前,低功率雷达可以使用的频带有24GHz频带*2、60GHz频带、76GHz频带和79GHz频带,每个频带都规定了各自的技术条件。其中,毫米波频带(60GHz频带、76GHz频带和79GHz频带)具有较宽的带宽,因此能够进行高精度检测。
另外,脉冲方式和FMCW方式*3是毫米波雷达的代表性方式,其特征如表2所示。
脉冲方式 | FMCW方式 |
|---|---|
向目标物体发射宽度很短的脉冲,脉冲宽度从几十纳秒到几 | 这种方式向目标物体发射对连续波进行频率调制后的发送 |
*2 24GHz频带:24GHz频带的波长为12.5mm,不在毫米波定义的10mm至1mm范围内,因此有时被称为“准毫米波”。
*3 FMCW是Frequency Modulated Continuous Wave的缩写,意思是使用对频率进行调制后的连续波的方式。
*4 图3显示了FMCW方式发射波的示意图。它有时被称为Chirp波形。
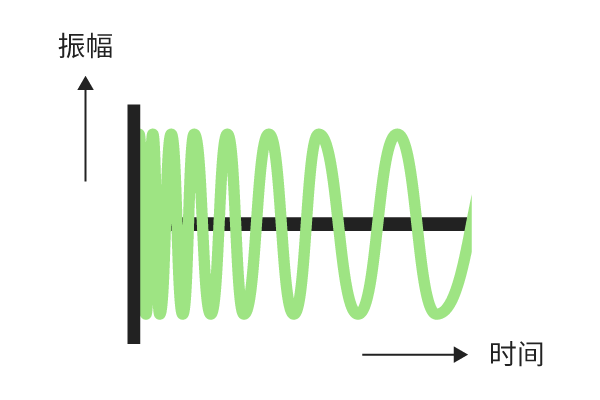
毫米波雷达有多种方式,但基本都是从FMCW方式发展而来的方式。因此,下面将对FMCW方式毫米波雷达的构成和目标物体检测的大概原理进行说明。尽管它构成简单,但可以获取距离、速度和角度等复合信息。
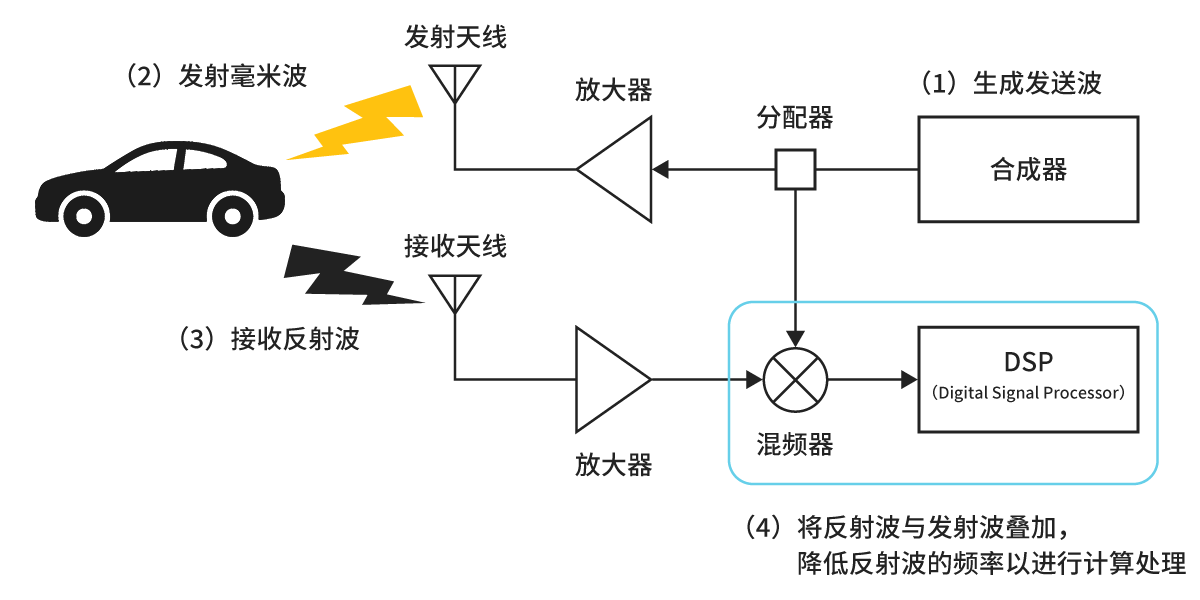
《毫米波雷达的构成》
合成器:生成待发送的毫米波频带电波(发送波)
发射天线:发射发送波
接收天线:接收反射波
混频器:将发射信号和接收信号进行组合
DSP(数字信号处理装置):实施计算处理
《检测的原理》
(1)发送波的生成:通过合成器生成毫米波频带的发送波。
(2)毫米波的发射:将发送波从发射天线连续发射至目标物体。
(3)反射波的接收:通过接收天线接收从目标物体返回的反射波。
(4)计算处理:通过混频器将发送波和反射波进行组合,经A/D转换器转换为数字信号,再通过DSP进行计算处理,以确定与目标物体之间的距离、角度和速度等。
在第3项中说明的FMCW方式毫米波雷达已被应用于很多现场。这里,我们将以汽车、工业机器人和无人机为例,对它的应用场景及贡献的功能进行说明(表3)。
| 用途 | 主要应用场景 | 使用的频带 | 检测内容 | 贡献的功能 |
|---|---|---|---|---|
| 汽车 | 车辆周边监控 (前方、后方、侧面) 车内监控 | 76-81GHz频带 (车外) 60GHz频带 (车内) | •障碍物、其他车辆 •驾驶员/乘员状态 •儿童遗忘检测 | •自动刹车 •车道保持辅助 •有助于实现L2级 自动驾驶 •提高安全性 |
| 工业机器人 | 机械臂 AMR (自主移动机器人) | 主要为 60GHz频带/ 76-81GHz频带 | •与人员和物体之间 的距离 •速度、角度 •周围的障碍物 | •避免与人员接触 •控制/停止机械臂动作 •安全自主行走 |
| 无人机 | 在有人地带飞行 | 主要使用 60GHz频带/ 76-81GHz频带 | •与地面之间的距离 •柱子、墙壁 •电线、导线、天线 | •不易受天气影响 障碍物检测 •在有人地带安全飞行 |
在汽车领域,通过毫米波雷达检测车辆周边的障碍物和其他车辆,由此能够实现自动刹车和车道保持辅助等功能,毫米波被认为对实现L2级自动驾驶(部分自动驾驶)不可或缺。此外,监控驾驶员和乘客的状态以及是否有儿童被遗忘在车上也被作为提高安全性所不可或缺的功能而备受关注。
通过在工业机器人手臂上配备毫米波雷达,可以检测手臂与人或物体之间的距离,并可检测速度和角度数据,从而实现诸如停止手臂运动等预设动作。此外,还可以实现自主移动,例如,AMR(Autonomous Mobile Robot:自主移动机器人)可以在行走时避开货架、墙壁、行人以及多种工业设备等障碍物。
无人机,尤其是飞越有人地带的无人机,需要高度的安全性。通过使用毫米波雷达探测飞行路径,可以探测与地面之间的距离、柱子、墙壁以及电力线、电话线和布置在空中的天线等物体,不受天气条件的限制,从而确保在有人地带进行安全飞行。

毫米波雷达已被应用在多个领域,近年来,在欧洲进行汽车安全性能评估的Euro NCAP*5提出了强化碰撞安全试验,因此,毫米波雷达在提高车内安全性的“座舱监控系统”中的应用备受关注。
*5 Euro NCAP:European New Car Assessment Programme(欧洲新车安全评鉴协会)的缩写。该协会是一个对在欧洲销售的新车的安全性进行评估和发布的独立机构。它对碰撞安全性和行人保护等前沿安全技术进行测试和评级,已成为消费者选车的指标。另外,NCAP在各国都有,例如,在美国有IHS rating,在日本有JNCAP。
2023年,Euro NCAP发表了新的评估项目。除了根据乘员体格自动展开安全气囊的技术以及检测安全带使用情况的技术外,为了预防近年来“因儿童被遗忘在车内而导致的中暑事故”,评估对象中还新增了儿童遗忘检测功能。为了满足这些要求,能够掌握车内状况的座舱监控系统不可或缺。
座舱监控系统是一种利用车内传感器监控驾驶员和乘员的状况,并在需要时启动制动或警报的机制。它由驾驶员监控系统DMS(Driver Monitoring System)和乘员监控系统OMS(Occupant Monitoring System)组成,驾驶员监控系统用于确认驾驶员的身体状况和注意力,乘员监控系统用于掌握乘员的位置和行动。传感器中一直在使用摄像头,但在许多情况下,仅靠摄像头难以检测到,例如后向式儿童安全座椅上的婴儿、裹在毯子里的乘员以及安全带的佩戴状况等。
在这些情况下,作为补充和替代摄像头的装置(传感器),毫米波雷达被认为很有前景。毫米波雷达能够穿透织物和座椅靠背,因此可以检测到“摄像头无法看到的对象”。此外,它对于微小的动作也能捕捉到,因此对于心率和呼吸等生理功能的轻微变化也能检测。凭借这些特征,毫米波雷达有望为大幅提高座舱监控系统中的DMS和OMS的功能做贡献,并有助于符合Euro NCAP要求的新安全标准。
毫米波雷达是一种具有优良检测能力的装置——传感器,但为了满足今后多样化的检测需求,将包括毫米波雷达在内的超声波传感器、红外传感器和摄像头等多种传感器相组合的“传感器融合”至关重要。
传感器融合是一种整合来自多个传感器的数据,以获取单个传感器无法获取的信息的技术。例如,通过将毫米波雷达与图像传感器相组合,不仅可以从人体运动中获取驾驶员的疲劳程度和注意力水平信息,还可以从眼球运动和面部表情中获取信息,并根据需要发出警报。
将来,除了汽车外,在工业机器人、无人机和多种出行设备中,以毫米波雷达为中心的传感器融合技术也有望大幅提高周边状况的识别精度、安全性和可靠性。