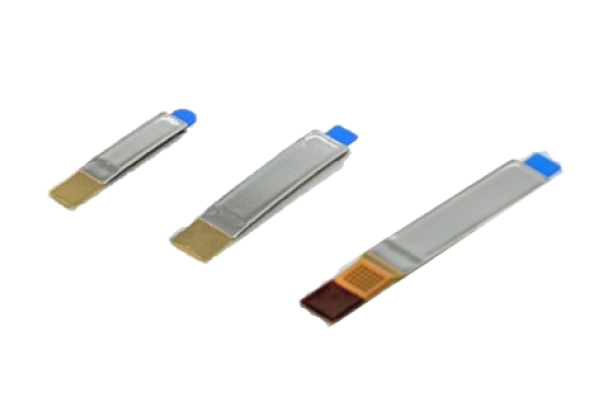
圧電フィルムセンサ(Picoleaf™)

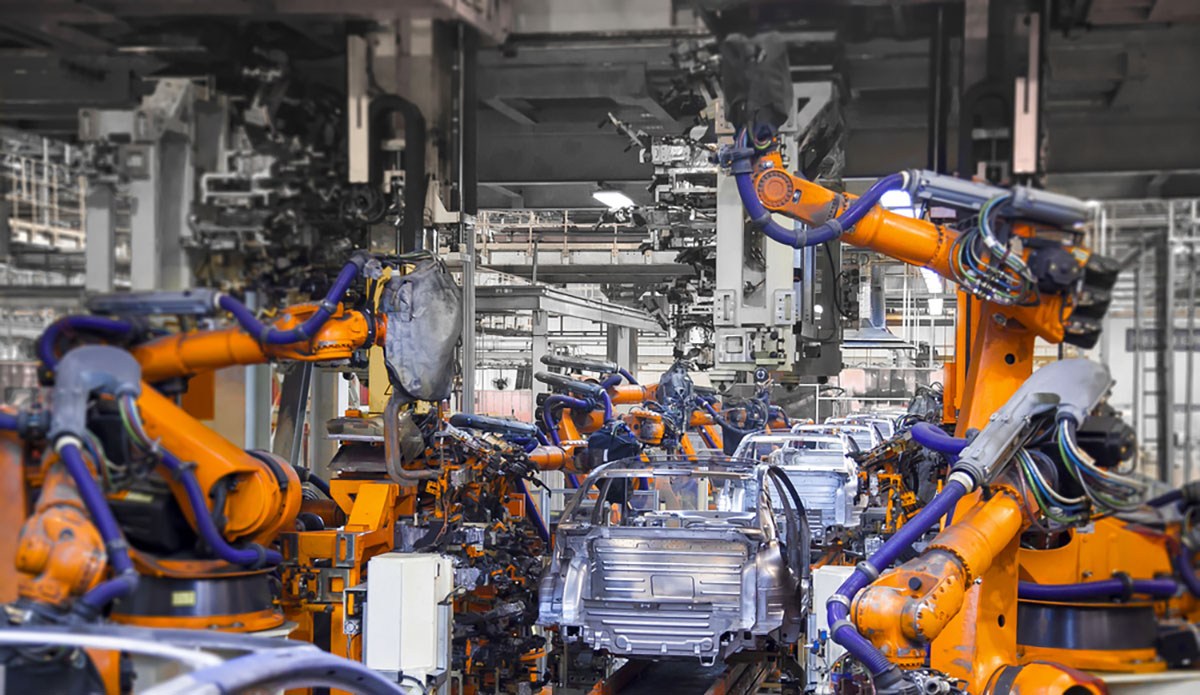
一般にロボットといえば、代表的な産業用ロボットのように、硬質かつ堅牢で力強く、正確かつスピーディーに動作するものが連想されます。たとえば、自動車の車体や建材の狙った箇所に対して過酷な溶接作業を連続的に行ったり、高出力のレーザーで金属などの硬い材料を切断したり、あるいは重い材料や部材をピッキングしたりするロボットなどが挙げられます。
また、近年は人とのわずかな接触を検知して自動停止するなど、作業者のそばで安全に使用できる協働ロボットも製造現場で多用されています。強いトルクや正確さを要する作業を人に代わってティーチングまたはセンシングしたとおりに行い、人特有の曖昧さを克服したり、人が持ちえないパワーや労働力を補ったりという点で、協働ロボットは従来の産業用ロボットの延長線上にあるといえます。
一方、「ソフトロボティクス」とは、やわらかい材料を使っていたり、しなやかな動きができたりするソフトロボットの技術を意味します。これには、人が持たない性質の補完を主に追究してきた従来のロボティクスとは異なる設計思想がみられます。たとえば、自然界の生物や人体の構造などから着想を得たり、それらの動きを模したりして設計されたソフトロボットも多く存在します。
ソフトロボットにはさまざまな種類がありますが、やわらかくしなやかな動きが可能であると同時に、特有の「曖昧さ」を強みとするロボットともいわれています。この曖昧さこそ、従来のロボティクスとは大きく異なる要素で、不定形なワークのピッキングや臨機応変な動き、狭く複雑かつ一定ではない形状の空間での作業などを可能とします。また、人体そのものをアシストする用途にも応用できます。それにより、製造現場だけでなく幅広いシーンで、ソフトロボットを活用した効率化が期待されています。
ソフトロボティクスの分野では、さまざまな目的や課題に対して多種多様なアプローチでロボットが研究開発されています。いずれもソフトロボット特有のやわらかさやしなやかさ、そして「曖昧さ」の要素を構造や構成材料に盛り込んで解決策としていることが特徴といえます。
以下では、ソフトロボットの手法や技術、用途の例について紹介します。
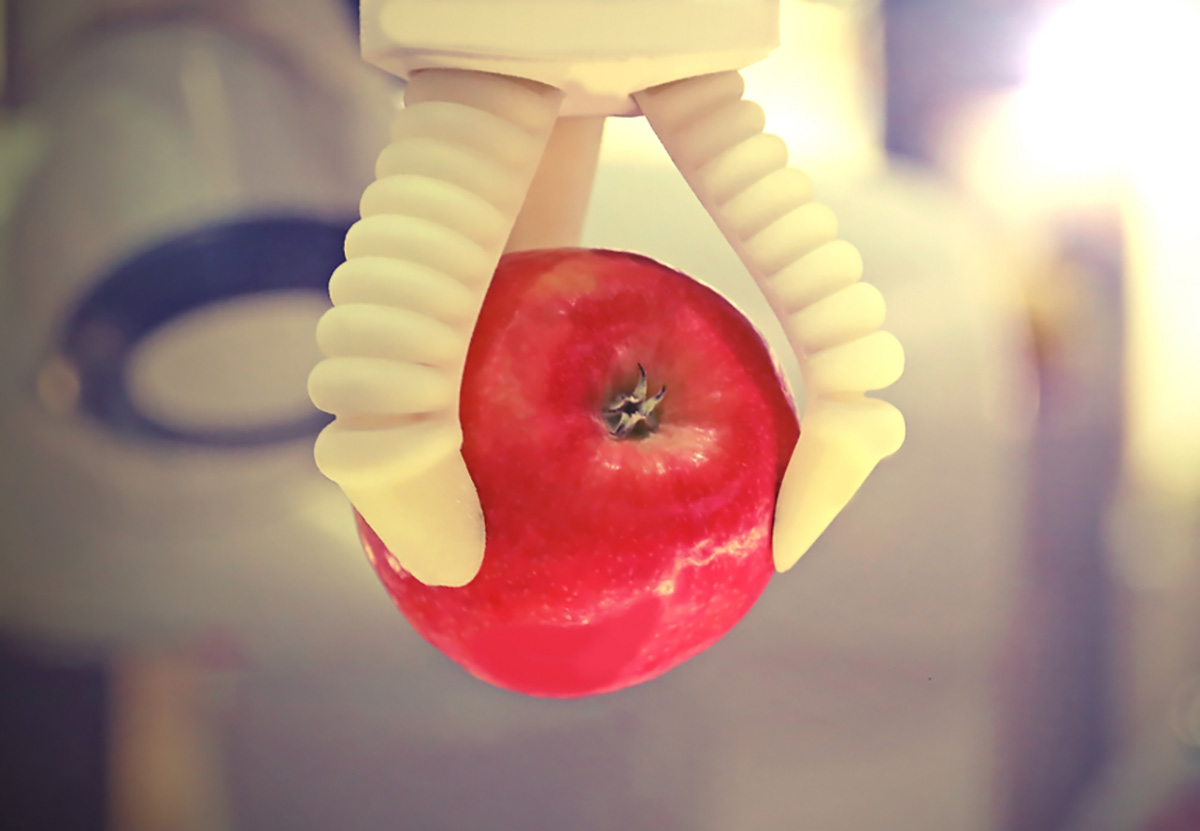
従来のロボットハンドは金属など硬い素材でできたものが多く、力強さに対する堅牢性やワーク寸法に対して高い精度を得ています。一方、軟性の高い樹脂などでできたソフトハンドを空気圧で制御するといった手法であれば、やわらかい容器に盛り付けた食品や薄いグラス、紙製の容器など壊れやすいものを丁度いい力加減で摑んで運んだり、サイズや形状がまばらな対象物を1種類のハンドで摑んだりすることが可能となります。
ほかにも、やわらかいワイヤーで対象物を囲い、その範囲を巧みに調節することで、崩れやすい加工食品などの対象物をそのままピッキングするという手法も開発されています。
やわらかいだけでなく、ひとつのグリッパで必要に応じて硬さと形状を変化させるソフトロボットもあります。たとえば、粉体を袋に入れたグリッパは、ある程度空気が入った状態ではやわらかく、空気を抜けばそのときの形状で粉体同士の隙間がなくなり硬くなります。このような機構はジャミングと呼ばれ、これをロボットのグリッパとして採用することで、複雑かつ不定形な物体を摑んだり、対象物やボタンを押したりなど、作業に求められる硬さや柔軟性を1台のロボットで実現します。こうしたジャミング機構を持つグリッパを装備したロボットは、柔軟な対応が求められる災害現場での救助活動などで活用が期待されています。
細い配管の内部点検など、人の手が届かない場所での作業の効率化を目的としたとき、点検対象に順応できるソフトロボットが有効です。たとえば、ミミズやヘビといった生物を模したソフトロボットであれば、細く複雑な形状を持つ配管の内部であっても自由に入り込み、非破壊で内部の詳しい点検や検査などを行うことができます。
また、ゾウの鼻やタコの足を模したソフトロボットも開発されており、これまでの多軸ロボットでは不可能だった複雑かつ柔軟な動作を可能としています。さらに、カメラを搭載し、ダイバーが進入できない海中の入り組んだ場所でも魚を模した柔軟な動きで泳いで撮影できるソフトロボットが活用されています。加えて、宇宙探索の分野では、木星のような巨大ガス惑星の衛星探索に従来の地上用探査機が使用できないため、イカを模したソフトロボットの研究が進められています。
人体は片脚ずつ3つの関節がありますが、6軸のロボットであっても同じように柔軟で繊細な動きはできません。なぜなら人は3つの関節を動かすために50個もの筋肉を使っているからです。そんな解剖学的な観点から開発された人工筋肉も存在します。外径が細く、しなやかで伸縮性が高い特殊な材質のワイヤーを複数束ね、それを空気圧で制御することで、まるで人の筋肉のような動きを可能とします。このような人工筋肉の分野では、独立したソフトロボットへの応用のみならず、人の動きや姿勢をサポートする福祉介護用具や細径人工筋肉を繊維材料に採り入れたサポートスーツなど、多様な形態での実用化にむけて実証研究が進められています。
ロボティクス分野のみならず、エレクトロニクス分野でもやわらかい素材を使って柔軟性を得たり、折り曲げたり、ねじったりできる電子デバイスである「フレキシブルエレクトロニクス(フレックス回路)」のニーズが高まっています。その理由は、IoT機器やウェアラブル機器などの低背化や高機能化とそれにともなう搭載部品の小型化・高密度化に加え、筐体の形状やサイズ、可動部分の設計の自由度とそれによるユーザビリティの向上が求められるようになってきたためです。
フレキシブルエレクトロニクスでは、絶縁性を持つ薄くてやわらかい樹脂製のベースフィルムに、銅箔などの導電性金属を貼り合わせて電気回路を形成した「FPC(Flexible Printed Circuits)」が代表的といえます。ほかにも、小型な筐体の狭窄な内部に曲げたままコンパクトに搭載できる電子回路基板や、曲げることができるLCDディスプレイ・OLEDディスプレイ・薄膜電池(薄膜太陽電池・湾曲型電池)などがあります。また、精緻なパターンをフィルムなどに印刷し、曲げることができる材料に回路を形成するプリンテッドエレクトロニクスの技術を用いたセンサ類なども登場しています。
これらの用途としては、折りたたみ式のスマートフォンといった電子機器が代表的ですが、ソフトロボットの柔軟な動きを妨げない重要なデバイスとして応用されるケースの増加も予想されます。
なお、村田製作所においても、フレキシブルなリード線を持つ熱応答性の高いNTCサーミスタや、環境に配慮したやわらかい材料でできた圧電フィルムセンサといった商品を開発・製造してきました。
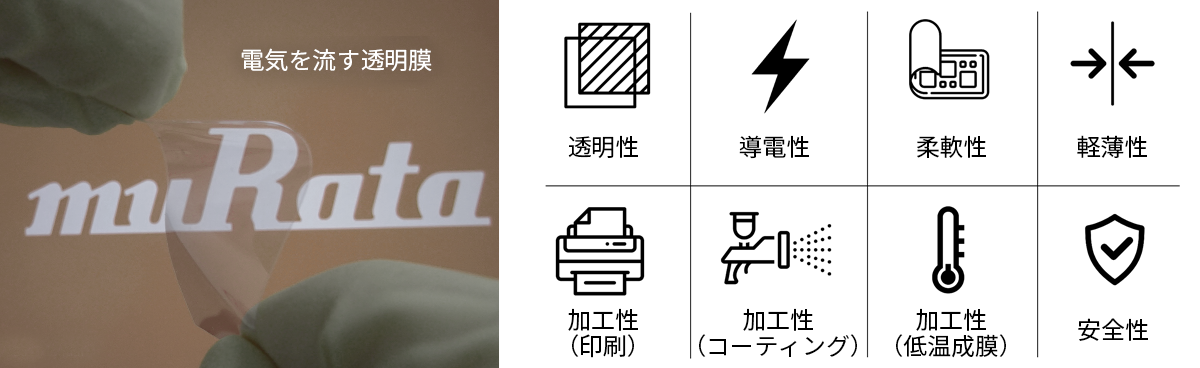
近年では、これまでトレードオフの関係であった高い透明性と導電性をやわらかく曲げ耐性の高い材料で両立した「透明で曲がる導電膜(仮称)」を開発。加工性が高く、皮膚感作性が少なく安全性にも優れているため、幅広い分野での応用が期待できます(図1)。
「透明で曲がる導電膜(仮称)」に関する詳しい記事はこちら
IoT時代を切り拓く透明で曲がる新たな導電膜、新発想の応用を共に議論するパートナー募集(技術解説編)
IoT時代を切り拓く透明で曲がる新たな導電膜、新発想の応用を共に議論するパートナー募集(応用イメージ編)
こうしたフレキシブルエレクトロニクスの技術は、より人や社会に近いところで活躍するポテンシャルを備えています。また、「やわらかく、融通がきき、順応性がある」という点で、ソフトロボティクスと高い親和性を持つテクノロジーであるといえます。実際にソフトロボットにフレキシブルセンサなどのやわらかい電子デバイスが用いられるケースもあります。このように、やわらかさや柔軟性に長けたロボティクスとエレクトロニクスの双方の技術やアイディアをうまく掛け合わせ、より高度な技術を実現することで、ソフトロボットをより幅広い用途に活かすことができる未来は想像に難くありません。