Piezoelectric Film Sensor (Picoleaf™)

The word “robot” generally brings to mind something like an industrial robot: hard, solid, and powerful, while at the same time capable of performing tasks precisely and rapidly. Examples would include robots that repeatedly perform rigorous welding operations at precisely defined spots on automobile bodies or building materials, robots that use high-output lasers to cut through hard materials like metal panels, and robots that precisely select and transport heavy materials or components in warehouses or factories.
There are also cooperative robots, which have become widely used in recent years in manufacturing plants. They work alongside human operators to ensure safety by, for example, automatically halting operation when they sense the slightest human contact. Cooperative robots are an extension of conventional industrial robots in terms of their ability to take the place of human operators by performing tasks requiring powerful torque or extreme precision exactly as specified by teaching or sensing, their ability to overcome the characteristic ambiguity of humans, and their strength and ability to labor unceasingly far beyond the capabilities of human operators.
“Soft robotics,” in contrast, is the technology behind soft robots that use soft materials and move in a flexible manner. This reflects a design concept that differs from conventional robotics, which mainly focuses on supplementing characteristics that humans lack. For example, many soft robots are inspired by the structural characteristics of creatures in the natural world or humans, and are designed to mimic their movements.
There are many different kinds of soft robots, but they can all be described as combining softness and a capability for flexible movement while also making a strength of a characteristic “ambiguity.” It is this ambiguity in particular that is the main element differentiating soft robotics from conventional robotics. It makes possible such things as the ability to pick up work pieces of indeterminate form, to adapt operation to environmental conditions, and to operate in narrow and complex spaces with unfixed layouts. Soft robots are also suited to applications in which they assist the human body itself. For this reason, soft robots are seen as having the potential to boost efficiency in a wide variety of settings, not just manufacturing plants.
In the field of soft robotics, R&D work on robots is taking place using a variety of approaches to deal with many different purposes and issues. It can be said that the solutions tend to incorporate structures and structural materials for which the characteristic softness and flexibility of soft robots, as well as “ambiguity,” are key elements.
The methodology and technology behind “soft robots,” and some example applications, are presented below.
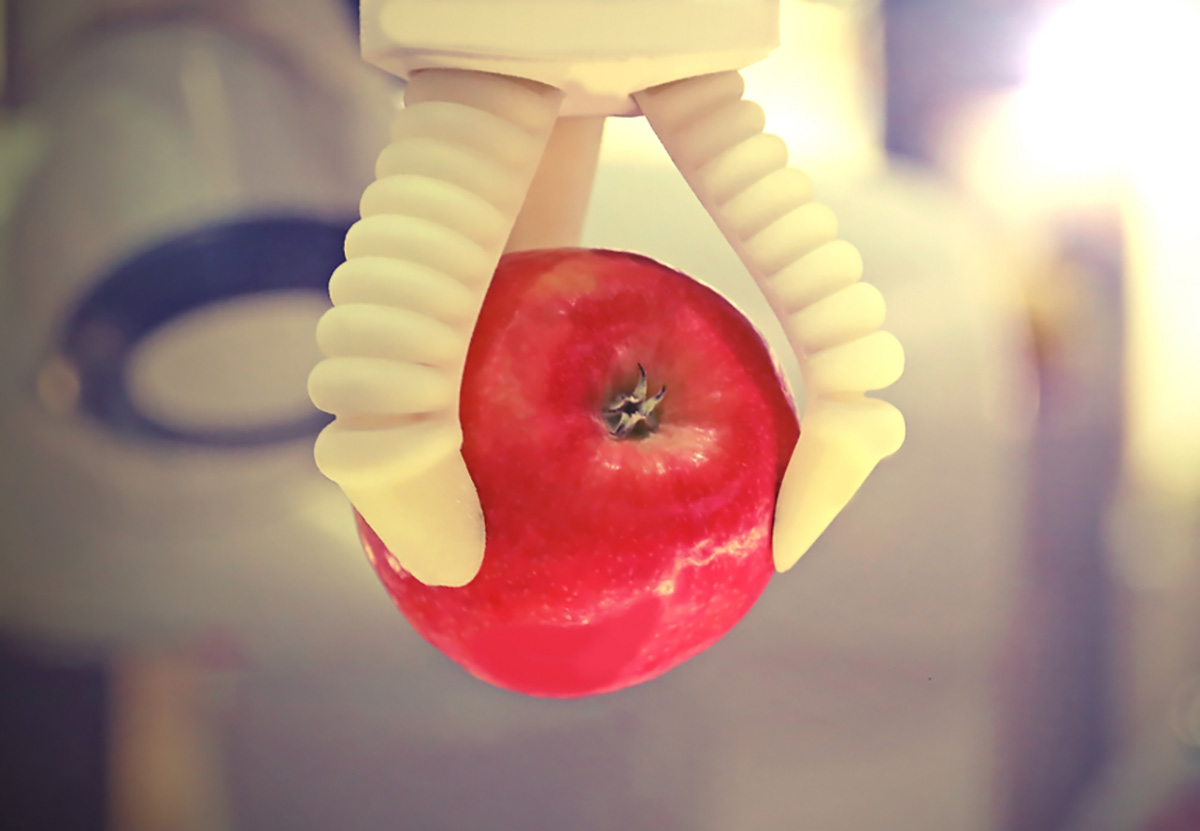
In the past, robot hands tended to be made of hard materials such as metal in order to provide solidity to match power and a high level of precision to match workpiece dimensions. However, methods such as using air pressure to control soft hands made of highly elastic resin or the like make it possible to carefully grasp with the appropriate amount of force food products packed in soft containers or fragile articles made of thin glass or packed in paper containers. It also allows a single type of hand to be used to grasp objects of different sizes and shapes.
Another method that has been developed involves enclosing the target object in soft wires and then skillfully adjusting their range to pick up easily crushed items such as processed foods.
There are also soft robots that are not just soft, but also capable of changing the hardness and shape of individual grippers as needed. For example, there is a type of gripper that consists of a bag filled with powder. The gripper becomes softer when some air is let in, and when the air is pumped out the gaps between the powder particles disappear and the gripper becomes hard. This type of mechanism is based on a technique known as “jamming,” and it enables such robot grippers to grasp complex objects with different forms or to press target objects or buttons. In this way, a single robot can provide the required hardness and flexibility to accommodate a variety of operations. Robots equipped with grippers utilizing jamming mechanisms have potential for use in applications requiring flexibility, such as rescue work at disaster sites.
Soft robots can be effective in increasing the efficiency of operations in places that human hands cannot reach, such as inspecting the interior of narrow tubes, because they are able to adapt to the characteristics of the target of the inspection. For example, a soft robot that mimics the characteristics of an earthworm or a snake would be able to freely enter the interior of narrow pipes with complex configurations to perform detailed inspections or checks without causing damage to the interior of the pipes.
What’s more, soft robots have been developed that mimic the characteristics of an elephant’s trunk or an octopus’ legs and that are capable of complex and flexible operations that are impossible for conventional multi-axis robots to perform. There are also soft robots equipped with cameras that mimic the characteristics of fish, enabling them to “swim” flexibly into undersea locations that divers cannot get to and photograph them. Finally, in the field of space exploration, research is proceeding into soft robots that mimic the characteristics of squid to explore the moons of giant gaseous planets such as Jupiter, a task for which conventional probes that operate on the surface are unsuitable.
The human body has three joints per leg, yet a robot with six axes cannot match the flexible and subtle movements our legs are capable of. This is because no fewer than 50 muscles are used to move the three joints in our legs. There now exist artificial muscles developed from such an anatomical standpoint. Consisting of bundles of thin wires made of a special, highly elastic material and controlled by means of air pressure, they are capable of movements just like those of human muscles. Applications in the field of artificial muscles are not limited to independent soft robots. They also include healthcare products designed to assist and support human movement and posture as well as wearable “support suits” that incorporate thin artificial muscles into the fabric they are made from. Experimental studies are now underway with the aim of achieving a variety of practical applications in a range of formats.
In addition to the field of robotics, the electronics field is also seeing growing demand for “flexible electronics” that use soft materials to achieve flexibility, bendability, and twistability. Reasons for this include the need for smaller and higher-density electronic components for use in products such as IoT devices and wearable devices that are becoming ever thinner as they gain increased functionality. At the same time, there is growing demand for more freedom and usability in terms of housing shapes and sizes as well as the design of moving parts.
The best-known example of flexible electronics is flexible printed circuits (FPCs), which consist of a base film made of a thin layer of soft resin with insulating properties, on top of which are formed electrical circuits made of a conductive metal such as copper foil. Other examples include compact electronic circuit boards that can be folded and inserted into the narrow interior of a small housing and bendable LCD displays, OLED displays, and thin-film batteries (thin-film solar cells or curved batteries). Also emerging are sensor products that employ printed electronics technology in which minute patterns are printed on a film or the like to form circuits on a bendable material.
The most representative application for flexible electronics is electronic devices such as foldable smartphones, but in a growing number of cases they are being used as key devices that do not impede the flexible movement of soft robots.
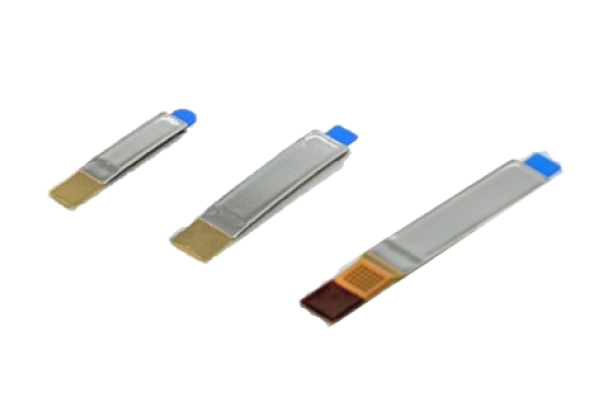
In this connection, Murata develops and manufactures products such as highly thermoresponsive NTC thermistors with flexible lead wires and piezoelectric film sensors made from environmentally friendly soft materials.
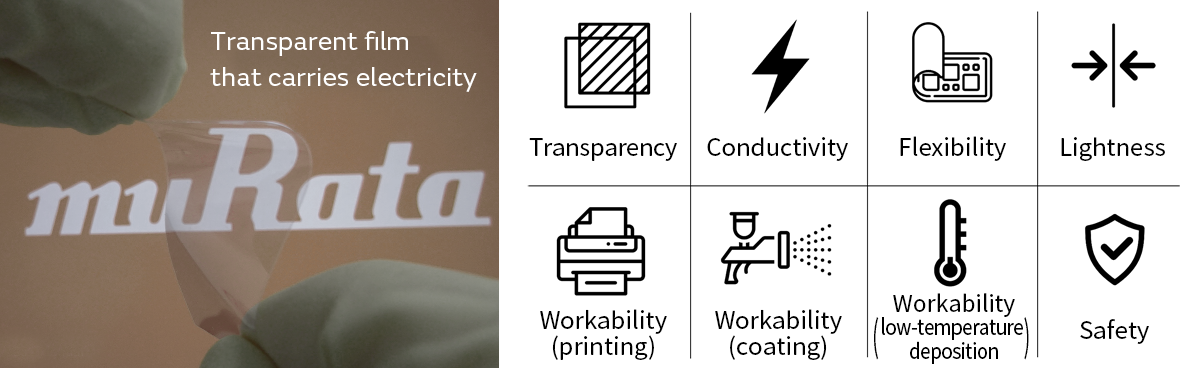
There had been a tradeoff between high transparency and conductivity, but in recent years, soft yet highly bendable materials that combine these characteristics have enabled the development of “transparent and bendable conductive film (provisional name).” It combines a high degree of workability with minimal skin sensitization and superior safety, making it potentially suitable for applications in a broad range of fields (Figure 1).
See the following articles to learn more about “transparent and bendable conductive film” (provisional name).
Murata Is Seeking Partners to begin discussions for a New Transparent and Bendable Conductive Film along with the Application of New Ideas to Open up the IoT Era (Technical Explanation)
Murata Is Seeking Partners to begin discussions for a New Transparent and Bendable Conductive Film along with the Application of New Ideas to Open up the IoT Era (Application Image)
Flexible electronics technologies such as those described above have the potential to assume more familiar roles for us and for society. They can be said to have a high level of affinity with soft robotics in terms of “softness, versatility, and adaptability.” In fact, there are already cases of the use of soft electronic devices such as flexible sensors in soft robots. By bringing together technologies and ideas from the fields of both robotics and electronics that excel in softness and flexibility in order to create more sophisticated new technologies in this way, it is not hard to imagine a future in which soft robots find an ever wider range of applications.