ロボットのエミッション対策手法-1(1/4)
INDEX
1. はじめに
ロボットは大きく産業用とサービスロボットに大別できますが、このロボットに適用される公的なノイズ規制は欧州地域を除いてありませんでした。
一方で、ノイズ規格団体のCISPR委員会では、ロボットに適用するノイズ仕様を検討しています。
2023年時点でノイズ仕様は検討中であるが、おそくとも2024年までには初版が一般公開されると予想します。
ロボットに適用を考えているノイズ仕様として、CISPR委員会ではCISPR11を考えているとの情報がインターネット上で公開されています。
ノイズ対策にはエミッション対策とイミュニティ対策がありますが、ロボットにおいてはイミュニティによる誤動作を防止するために様々な対策が行われています。一方で、新たな規制によってポイントとなるのは従来問題とされていなかったエミッション対策だと思われます。そこで本記事では、ロボットのエミッション対策のポイントについて解説します。
今回はロボットのエミッションについて、事例を用いて対策手法を紹介します。
現状のCISPR11のエミッション規制では、150kHz~30MHzで評価する伝導ノイズと、30MHz~1GHzで評価する放射ノイズの2つが求められています。

ロボットのノイズ規制は規格発行前のため、ノイズ規制の内容は変更になる可能性があります。
2. 市販ロボットの放射ノイズ評価
2-1. 放射ノイズの測定と評価
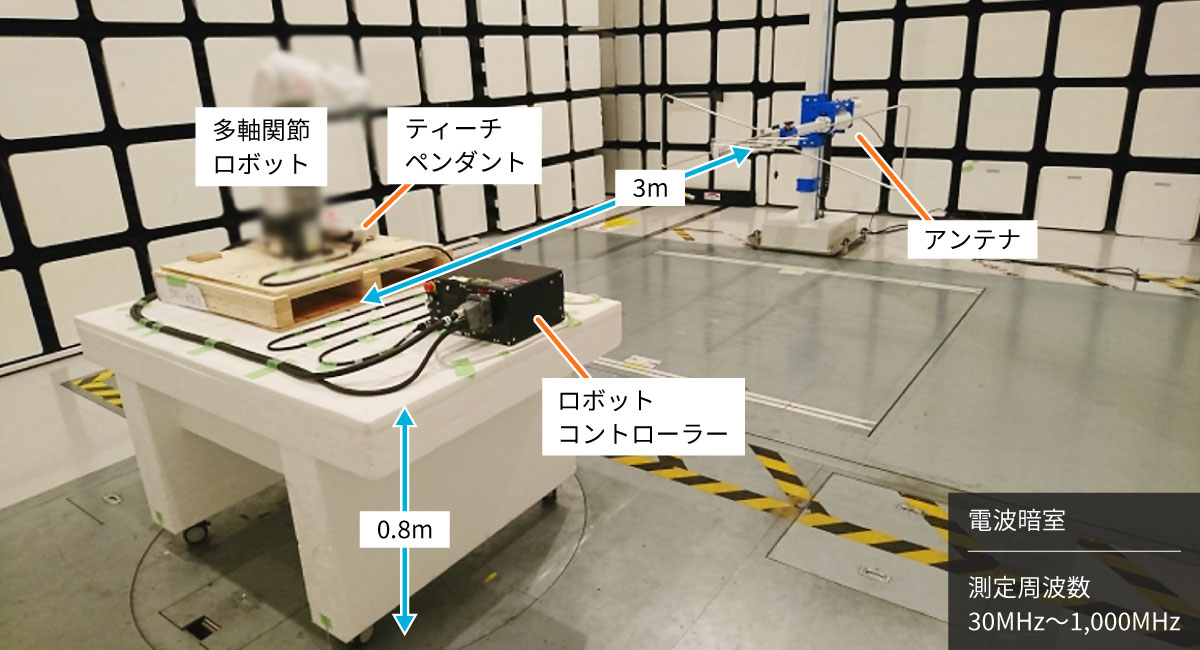
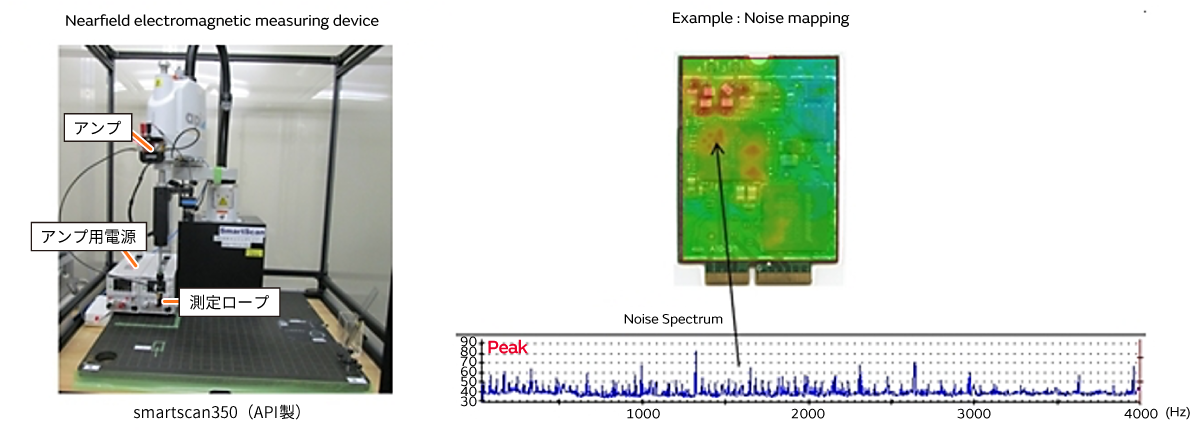
今回のエミッションノイズ評価では、CISPR11の放射ノイズ測定環境を参考にし、市販の多関節ロボット一式の放射ノイズを測定しました。
なおロボットは、任意の1関節を動作(左右繰り返し動作)を行いました。
放射ノイズの評価を行いました。
CISPR11には、ノイズ許容値が2つ設定されています。
ここでclass Aは、低電圧電源網(商用AC電源網と解釈)に直接接続されない機器を対象にしています。たとえば、キュービクルなどの高圧受電設備を介して、機器にAC電源が供給される場合です。一方class Bは、低電圧電源網(商用AC電源網と解釈)に直接接続される機器を対象にしています。共用の柱上トランスなど公共配配電網にてAC電源が供給される場合です。
多軸関節ロボットは、主に工場で使用されることが多いと考えられますが、今回用意した市販実機の放射ノイズはCISPR11 class Aの許容値を上回る結果であり、将来適用される規格のベースとなる CISPR11を満足できていないことが分かりました。
現状ではロボットに適用されるノイズ規制がないため、この状態でも問題ありませんでしたが、将来ノイズ規制が適用されると新たなノイズ対策が必要になると思われます。
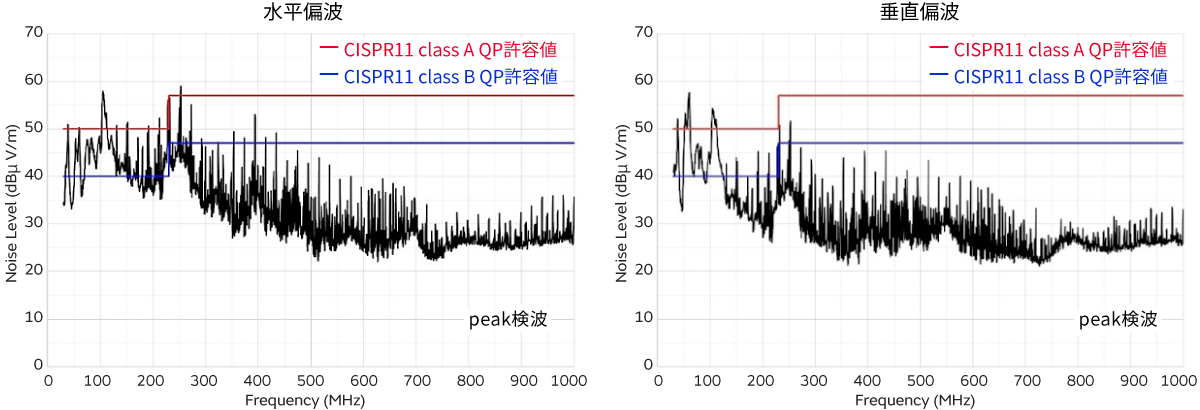
- 針状のノイズスペクトラムが観測できた。
2-2. 放射ノイズのメカニズムの調査
以下のような方法で放射ノイズのメカニズムを調査しました。
(実施した調査の一例)
- ノイズ源調査
磁界プローブや電界プローブを使用。※電磁界分布を調査
放射ノイズの発生傾向と類似するスペクトラムが観測される箇所を探す。 - ノイズ伝導経路
信号ラインや電源ラインの伝導ノイズを測定。磁界プローブや電界プローブを使用。
ケーブルの接続の有無でノイズ発生傾向が変わるかを測定。 - ノイズの切り分け(放射アンテナの調査)
機器を個別にシールドする。シールドBoxやシールド布などを使用。
ケーブルにフェライトコアを取り付ける。
動作モードを変えてみる。
購入した多軸関節ロボットの放射ノイズ発生メカニズムを調査した結果、以下のようなことが分かりました。
ノイズ源はDC-DCコンバータモジュールのスイッチングノイズでした。DCーDCコンバータのスイッチング周波数は470kHzです。
ノイズ伝導経路は3つあり、1つ目はDC-DCコンバータ出力のマイナスラインにスイッチングノイズが伝導していました。マイナスラインはコントローラーの筐体に接続されており、筐体にスイッチングノイズが伝導しました。
2つ目は、DCーDCコンバータの放熱板(スイッチングノイズが結合している放熱板)が筐体に接触していることで、筐体にノイズが伝導していました。
3つ目は、スイッチングノイズがのった制御基板に接続された各ケーブル(AC電源、モータ、エンコーダ、ティーチペンダントのケーブル)にノイズが伝導していました。
外部への放射につながるアンテナは、コントローラー筐体と各ケーブルでした。
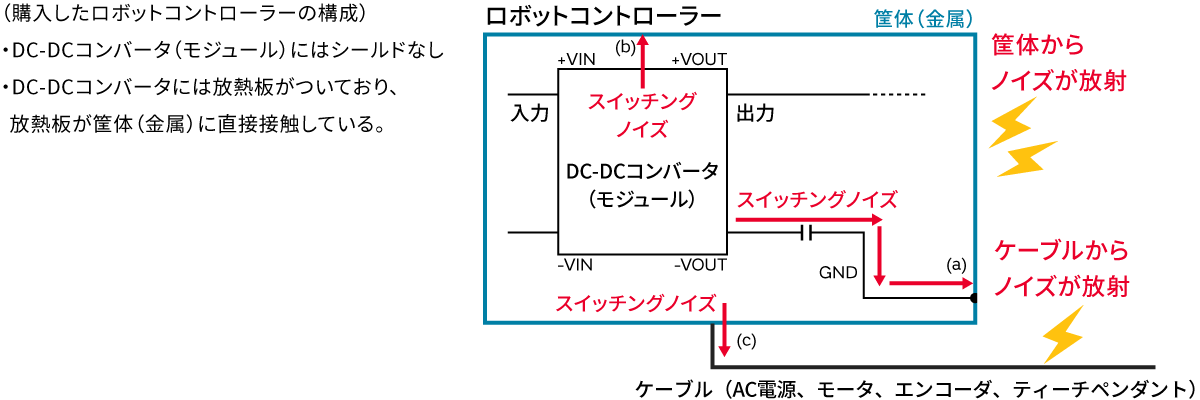
- ノイズ源:DCーDCコンバータ(スイッチングノイズ)
- 経路:
(a)DCーDCコンバータの出力マイナスラインから筐体に伝導
(b)スイッチングノイズが結合した放熱板から筐体に伝導
(c)制御基板のスイッチングノイズが各ケーブルに伝導 - 放射アンテナ:ロボットコントローラー筐体、各ケーブル
ロボットの放射ノイズを対策するには、コントローラー筐体および各ケーブルにノイズを伝導させないことが必要です。下図のように、DC-DCコンバータモジュールのシールドとノイズ伝導経路へのフィルタ挿入が効果的だと考えられます。
ただし、DCーDCコンバータのシールドが構造上難しい(後付けのシールドで放熱板に結合するノイズを除去しきれない、放熱を阻害してしまうためDCーDCコンバータが熱により故障する)ため、(a)や(c)の対策を行っても(b)の経路でノイズが伝導するため、ノイズ抑制効果が確認できませんでした。
(b)を対策するには、配線パターンの見直しやDCーDCコンバータモジュールの選定見直し、放熱の仕方を再検討する必要があると考えており、後付けのノイズ対策では限界があると判断しました。
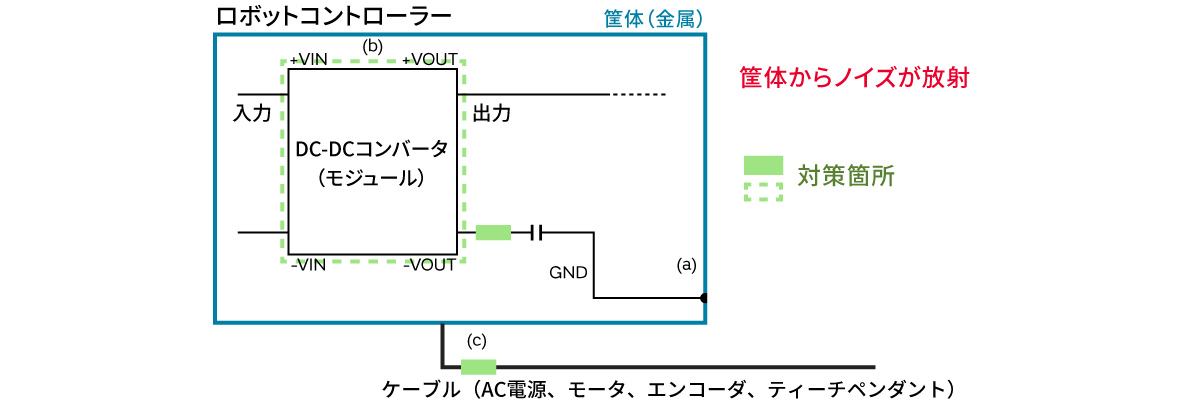
- 対策案:筐体および各ケーブルにスイッチングノイズを伝導させない
(a)出力マイナスラインにノイズフィルタ(フェライトビーズなど)
(b)DCーDCコンバータをシールド ※放熱板にノイズを結合させない
(c)各ケーブルにノイズフィルタ(コモンモードチョークコイルやフェライトビーズなど)
2-3. まとめ
今回の評価ではDC-DCコンバータモジュールからの放射を十分シールドすることができなかったため、フィルタを挿入した効果を確認することができませんでしたが、フィルタの選択のポイントとしては以下の①~③があげられます。
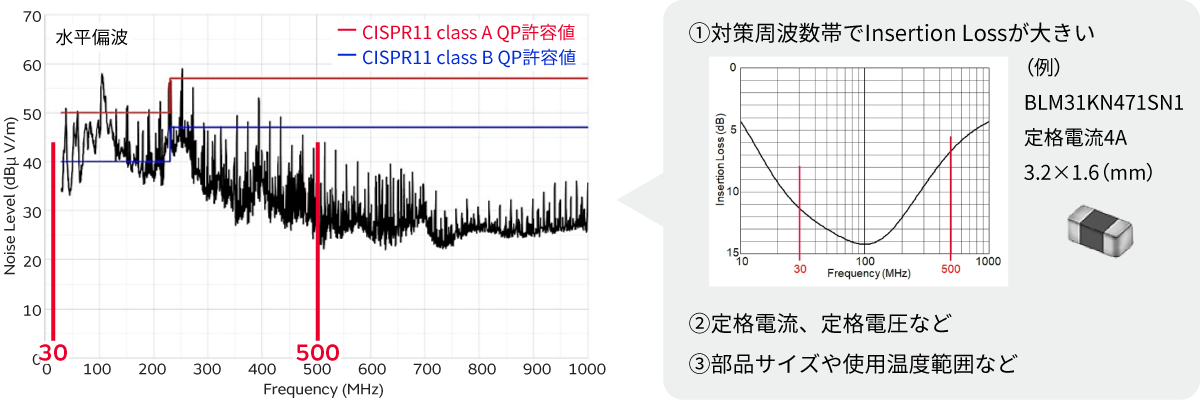
ロボットの放射ノイズは、多くの場合、30MHz~500MHzで問題になりやすいため、この周波数帯に着目したノイズフィルタの提案が効果的です。
- 続けて読む:ロボットのエミッション対策手法-2(2/4)