Robot Emission Suppression Measures-1 (1/4)
INDEX
2. Radiation noise evaluation of commercial robots
3. Pseudo-robot emission suppression (conducted noise)
4. Pseudo-robot emission suppression (radiation noise)
5. (1) Case example of brush motor noise
1. Introduction
Robots can be broadly classified into industrial robots and service robots. However, with the exception of the European region, no public noise regulations have been applied to such robots.
At the same time, a committee of the CISPR noise standards body is considering noise specifications for application to robots.
As of 2023, the noise specifications are still under consideration, and the first version is expected to be released to the public in 2024 at the latest.
Information has been published on the Internet that the CISPR committee is considering applying CISPR 11 as the noise specification for application to robots.
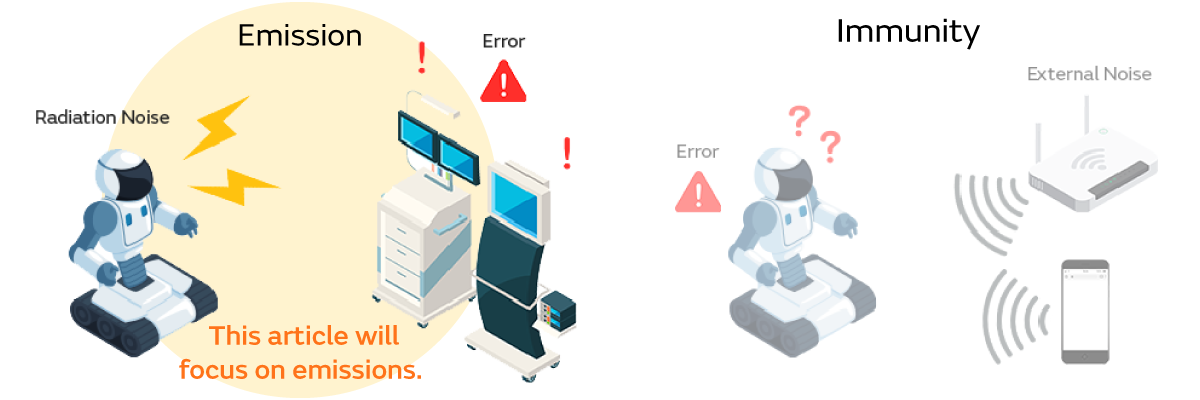
Noise suppression includes both emission and immunity suppression, and various measures are in place in robots to prevent malfunction due to immunity. At the same time, it is thought that emission suppression, which was previously not considered a problem, will become a key point due to the new regulations. Therefore, this article will explain the key points of robot emission suppression.
This article introduces suppression methods for robot emissions using case examples.
Under the current CISPR 11 emission regulations, equipment is required to have conducted noise evaluated at between 150 kHz and 30 MHz and radiation noise evaluated at between 30 MHz and 1 GHz.

Because standards for robot noise regulation have not been set, the details of the noise regulations may change.
2. Radiation noise evaluation of commercial robots
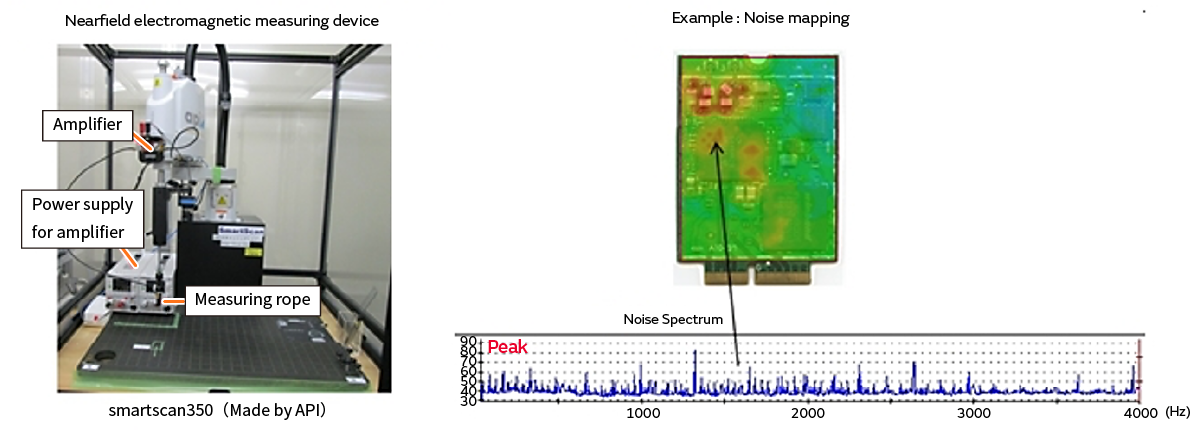
2-1. Radiation noise measurement and evaluation
In this emission noise evaluation, we used a CISPR 11 radiation noise measurement environment as a reference to measure the radiation noise of a commercially available articulated robot set.
Furthermore, the robot operated any single joint (repeated left-right motion).
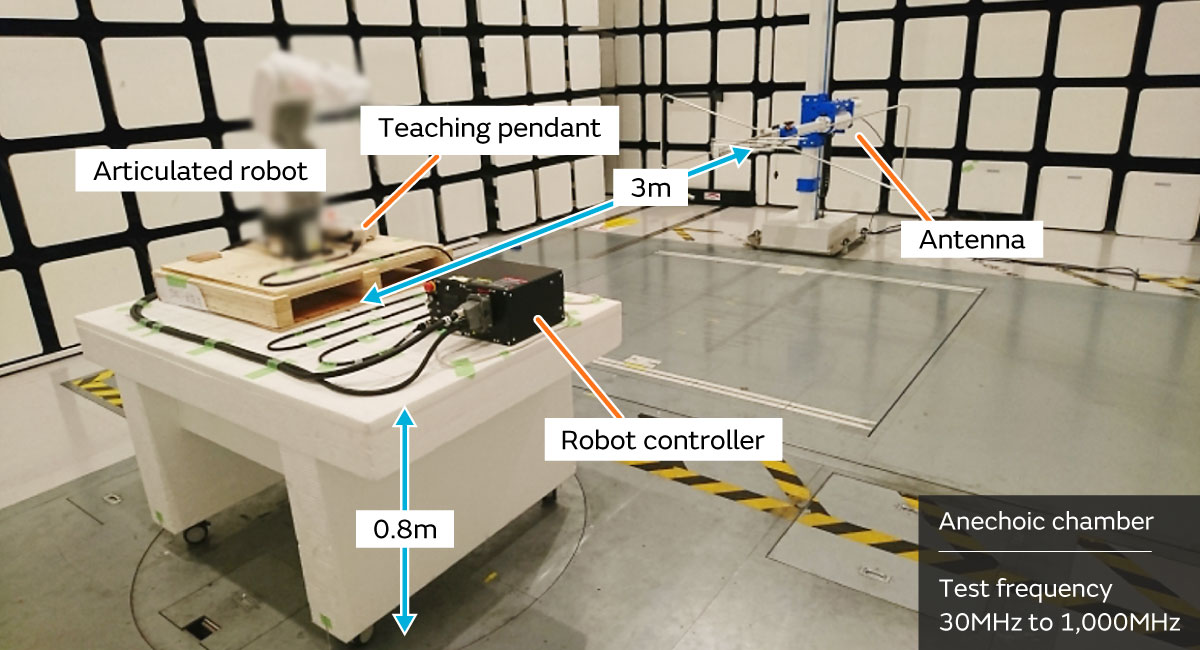
We evaluated the radiation noise.
Two noise tolerances are set in CISPR 11.
Here, Class A covers equipment that is not directly connected to a low-voltage power grid (interpreted as a commercial AC power supply network). For example, the case where AC power is supplied to equipment through a cubicle or other high-voltage receiving equipment. By contrast, Class B covers equipment that is directly connected to a low-voltage power grid (interpreted as a commercial AC power supply network). This would be the case where AC power is supplied in a shared pole-mounted transformer or other public distribution network.
Articulated robots are thought to be used mainly in factories. However, the radiation noise of the commercial robot prepared for this evaluation ended up exceeding the CISPR 11 Class A tolerances, and we found that it did not satisfy CISPR 11, which will become the basis of the standard applied in the future.
Because there are currently no noise regulations applied to robots, this is not a problem under these conditions. However, it is thought that new forms of noise suppression will be needed when the future noise regulations are applied.
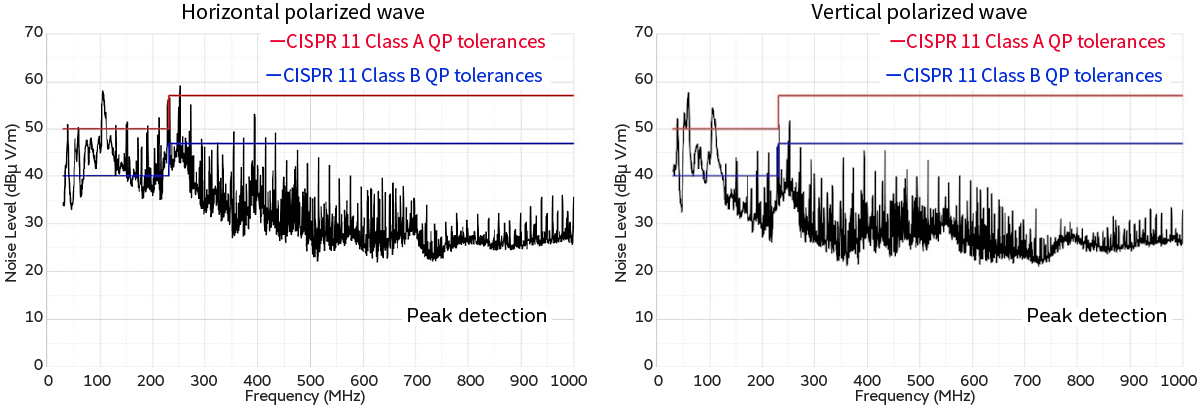
- A needle-shaped noise spectrum was observed.
2-2. Investigation of the radiation noise mechanism
We investigated the radiation noise mechanism using the following methods.
(An example of the investigation that was carried out)
- Noise source investigation
Used a magnetic field probe and electric field probe. *Investigated the field distribution
Searched for locations where a spectrum similar to the trend of radiation noise generation is observed. - Noise-conducting path
Measured the conducted noise of the signal line and power supply line. Used a magnetic field probe and electric field probe.
Measured whether the noise generation trend changes depending on whether the cable is connected. - Noise isolation (radiation antenna investigation)
Separately shielded the equipment. Used a shield box and shield fabric.
Attached a ferrite core to the cable.
Tried changing the operation mode.
As a result of investigating the radiation noise generation mechanism of the purchased articulated robot, we learned the following.
The noise source was the switching noise of the DC-DC converter module. The switching frequency of the DC-DC converter is 470 kHz.
There are three noise-conducting paths. The first path conducted switching noise to the negative line of the DC-DC converter output. The negative line was connected to the controller housing, and the switching noise was conducted to the housing.
The second path conducted noise to the housing due to the fact that the crystal heat dissipation plate of the DC-DC converter (heat dissipation plate that the switching noise is coupled to) touches the housing.
The third path conducted noise to each cable connected to the control board (AC power supply, motor, encoder, and teaching pendant cables) with superimposed switching noise.
The antennas leading to external radiation were the controller housing and each cable.
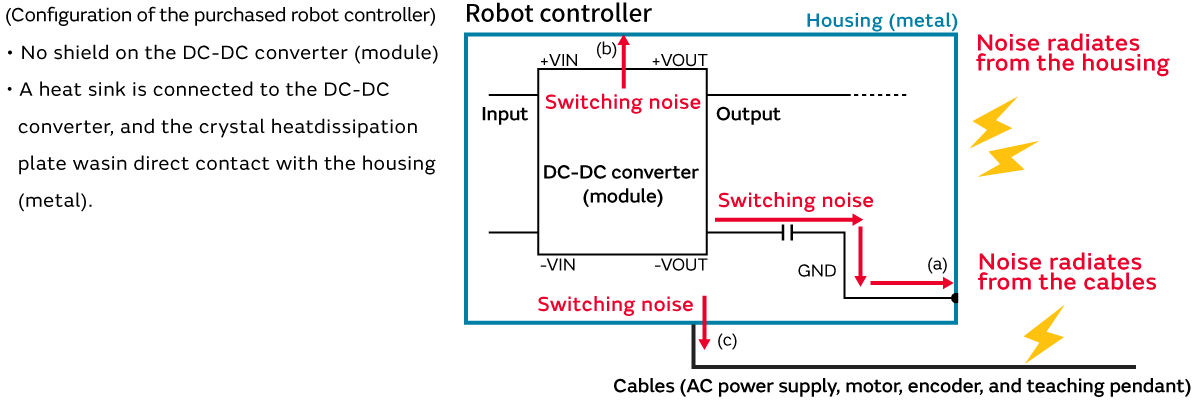
- Noise source: DC-DC converter (switching noise)
- Paths:
(a) Conducted from the output negative line of the DC-DC converter to the housing
(b) Conducted from the crystal heat dissipation plate with coupled switching noise to the housing
(c) The control board switching noise was conducted to each cable - Radiation antenna: robot controller housing and each cable
Suppressing the radiation noise of the robot requires that the noise not be conducted to the controller housing and each cable. As shown in the figure below, it is believed that shielding the DC-DC converter module and inserting a filter in the noise-conducting path is an effective approach.
However, because it is difficult to shield the DC-DC converter due to its construction (unable to completely remove the noise that is coupled to the crystal heat dissipation plate with a retrofitted shield, and it inhibits the heat dissipation, which causes the DC-DC converter to malfunction due to heat), even if measures are carried out for (a) and (c), noise is conducted along path (b), so we were unable to verify the noise suppression effect.
To carry out a measure for (b), it is believed that the wiring pattern and the DC-DC converter module selection must be reviewed along with reconsideration of the method of heat dissipation, and it was determined that there are limits to retrofitted noise suppression.
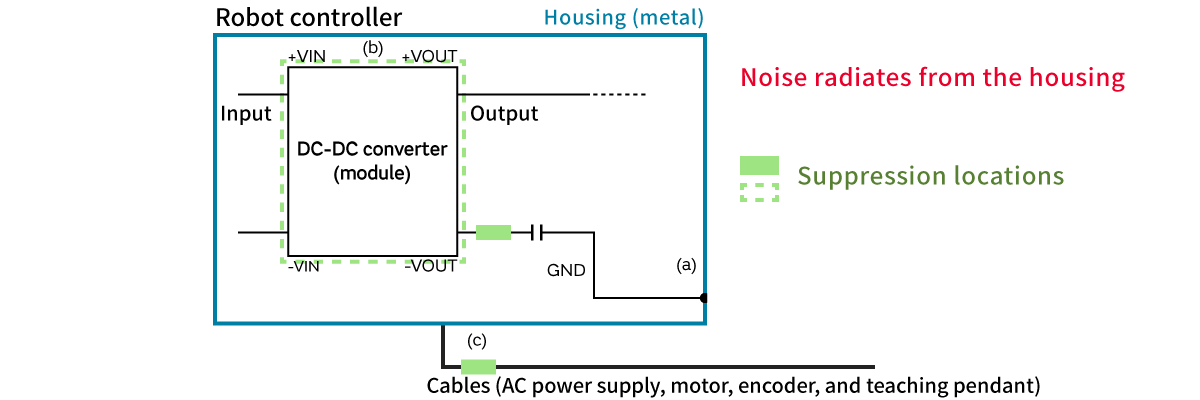
- Suppression proposal: do not conduct the switching noise to the housing and various cables
(a) Noise filter (ferrite beads, etc.) on the output negative line
(b) Shield the DC-DC converter *Do not allow noise to couple to the crystal heat dissipation plate
(c) Noise filter on each cable (common mode choke coil, ferrite beads, etc.)
2-3. Summary
Because we could not sufficiently shield the radiation from the DC-DC converter module in this evaluation, we were unable to verify the effect of inserting a filter. However, the key points for selecting a filter are shown in (1) through (3) below.
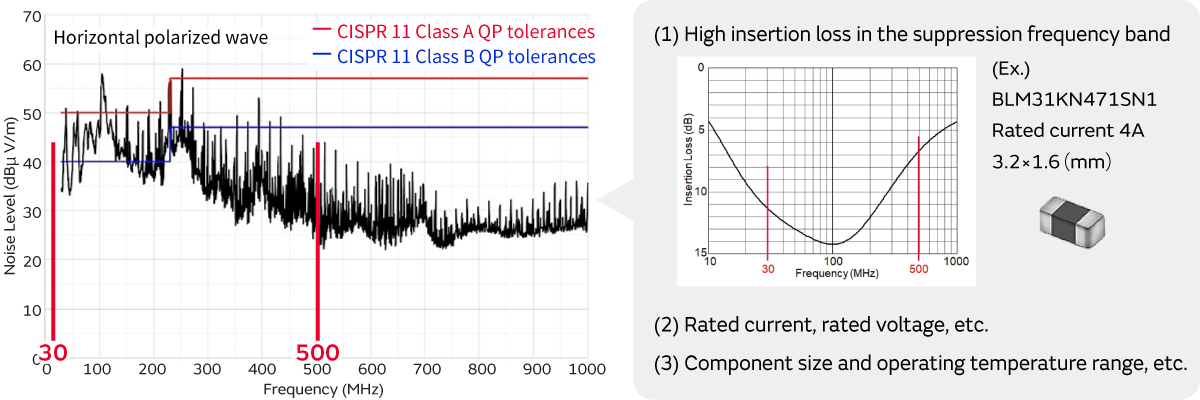
Because robot radiation noise is prone to becoming a problem in many cases between 30 MHz and 500 MHz, an effective approach is to propose a noise filter that focuses on the frequency band.
- Continue reading: Robot Emission Suppression Measures-2 (2/4)
Related articles
- Electromagnetic Interference from Industrial Equipment: Effects on Wireless Communication and Modern Mitigation Strategies
- Immunity improvement method for industrial equipment
- Murata Manufacturing Presents Solutions to Realize a Safe and Comfortable Car Society at the Automotive Engineering Exposition