机器人发射对策方法-1(1/4)
1. 前言
机器人可大致分为工业机器人和服务机器人,但除欧洲外,没有适用于机器人的官方噪声管制。
另一方面,噪声标准组织CISPR委员会正在讨论适用于机器人的噪声规格。
截至2023年,噪声规格仍在讨论中,但预计初版最迟将于2024年向公众发布。
互联网上发布的信息显示,CISPR委员会正在考虑将CISPR11作为适用于机器人的噪声规格。
噪声对策包括发射对策和抗扰度对策,在机器人中采取了多种对策来预防因抗扰度而发生故障。另一方面,新管制条例的重点预计是以前并未被视为问题的发射对策。因此,在本文中,我们将对机器人的发射对策要点进行解说。
本次将通过事例对机器人发射的对策方法进行介绍。
在目前的CISPR11发射管制中,要求对2种类型的噪声采取对策:在150kHz至30MHz的范围内评估的传导噪声,以及在30MHz至1GHz的范围内评估的辐射噪声。

机器人噪声管制尚未作为标准发布,因此噪声管制的内容可能会发生变化。
2. 市售机器人的辐射噪声评估
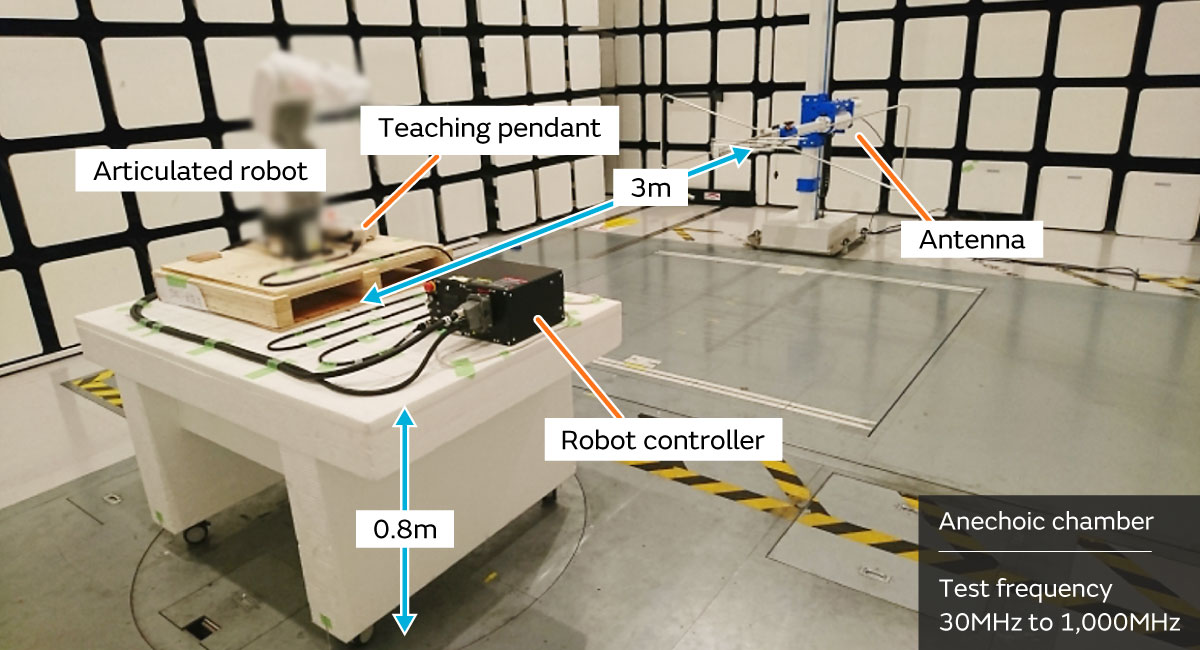
2-1.辐射噪声的测量和评估
在本次发射噪声评估中,我们参考CISPR11辐射噪声测量环境,测量了一组市售多关节机器人的辐射噪声。
另外,机器人进行了任意1个关节的动作(重复左右移动)。
我们对辐射噪声进行了评估。
在CISPR11中设定了2个噪声允许值。
在这里,class A以不直接连接到低压电网(解释为商用AC电网)的设备为对象。例如,通过配电柜等高压受电设备向设备提供AC电源时。另一方面,class B以直接连接到低压电网(解释为商用AC电网)的设备为对象。例如,通过共用电线杆上的变压器等公共配电网提供AC电源的情况。
多轴关节机器人被认为主要用于工厂,但我们此次准备的市售实机的辐射噪声结果超过了CISPR11 class A的允许值,可以看出并不满足作为将来适用标准的基础的CISPR11。
目前,还没有适用于机器人的噪声管制,因此这种状态也没有问题,但如果将来适用噪声管制,则可能需要采取新的噪声对策。
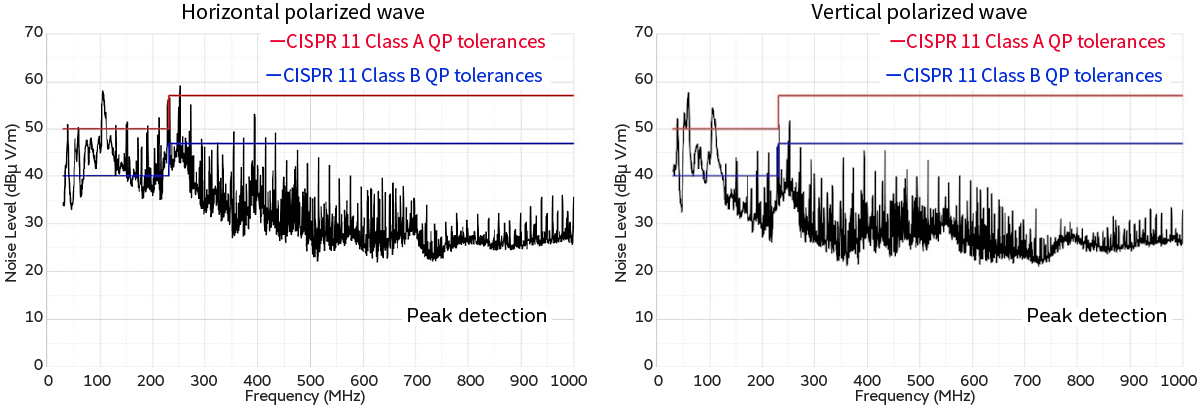
- 观测到了针状噪声频谱。
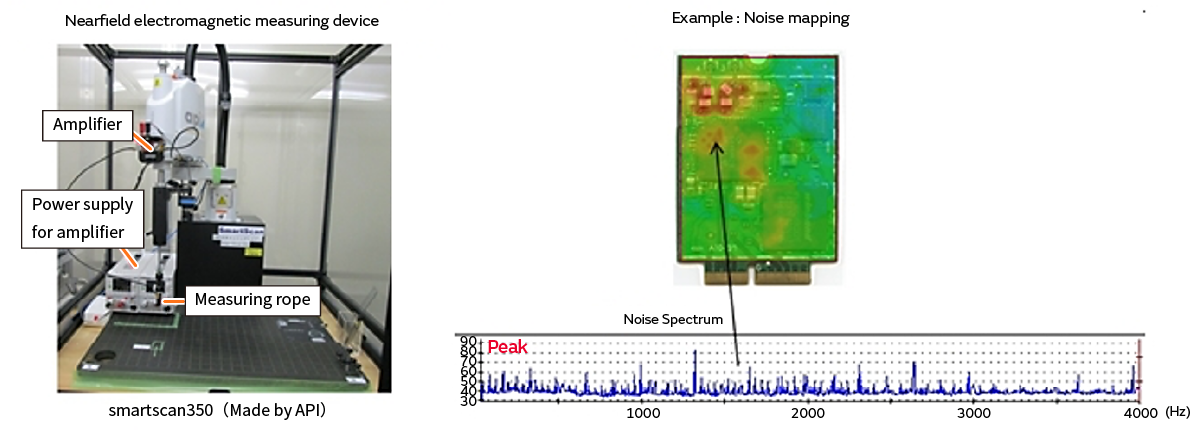
2-2. 调查辐射噪声机制
我们使用以下方法调查了辐射噪声的机制。
(实施的调查示例)
- 噪声源调查
使用磁场探头和电场探头。※调查电磁场分布
查找观测到与辐射噪声的产生倾向类似频谱的位置。 - 噪声传导路径
测量信号线和电源线上的传导噪声。使用磁场探头和电场探头。
测量噪声产生倾向是否随有无电缆连接而变化。 - 噪声分离(调查辐射天线)
单独屏蔽设备。使用屏蔽盒、屏蔽布等。
将铁氧体磁芯安装到电缆上。
尝试改变动作模式。
对我们购买的多轴关节机器人的辐射噪声产生机制进行调查后,我们发现了以下情况。
噪声源是来自DC-DC转换器模块的开关噪声。DC-DC转换器的开关频率为470kHz。
噪声传导路径共有3个,第1个是开关噪声传导到了DC-DC转换器输出的负极线。负极线连接到控制器的外壳,所以开关噪声传导到了外壳上。
第2个是由于DC-DC转换器的散热板(开关噪声互相结合的散热板)与外壳接触,导致噪声传导到了外壳上。
第3个是噪声传导到了连接到带有开关噪声的控制电路板的各个电缆(AC电源、电机、编码器、示教器的电缆)。
与向外部辐射有关的天线是控制器外壳和各个电缆。
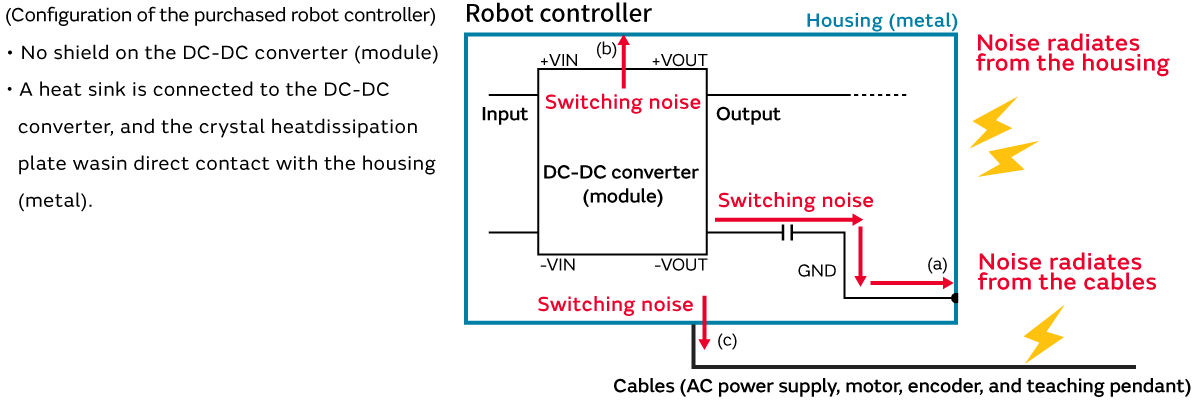
- 噪声源:DC-DC转换器(开关噪声)
- 路径:
(a)从DC-DC转换器的输出负极线传导至外壳
(b)开关噪声从结合后的散热板传导至外壳
(c)控制电路的开关噪声传导至各个电缆 - 辐射天线:机器人控制器外壳、各个电缆
为了对机器人的辐射噪声实施对策,需要预防噪声传导至控制器外壳及各个电缆。如下图所示,可以认为屏蔽DC-DC转换器模块和在噪声传导路径中插入滤波器是有效的方法。
然而,在结构上很难对DC-DC转换器进行屏蔽(使用后装的屏蔽无法彻底消除与散热板结合的噪声,并且会妨碍散热,从而导致DC-DC转换器因发热而发生故障),因此,即使对(a)和(c)采取了对策,噪声也会通过(b)的路径传导,所以未能确认到噪声阻止效果。
为了对(b)采取对策,我们认为有必要重新审视布线图案、重新审视DC-DC转换器模块的选择以及重新考虑散热方法,并且判断购买后进行的噪声对策解决不了全部问题。
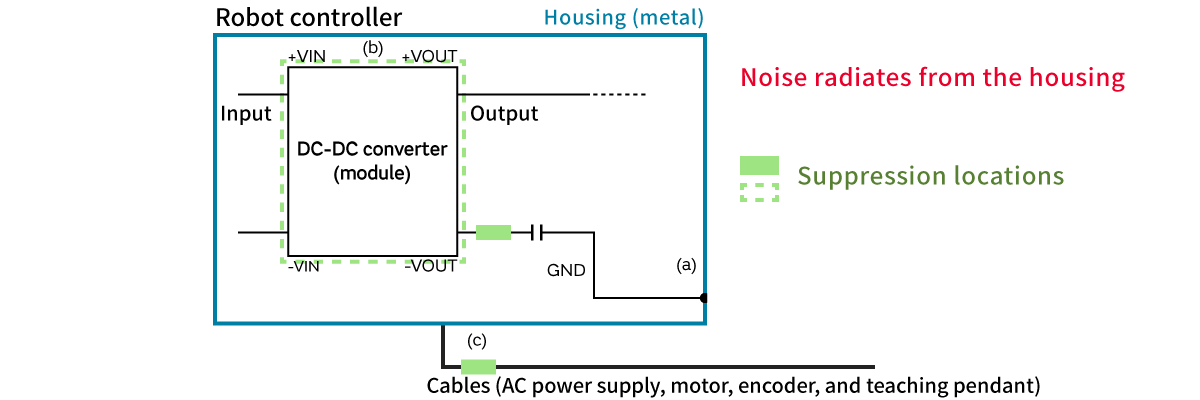
- 对策方案:预防开关噪声传导至外壳和各个电缆
(a)在输出负极线上插入噪声滤波器(铁氧体磁珠等)
(b)屏蔽DC-DC转换器 ※不让噪声与散热板结合
(c)在每条电缆上插入噪声滤波器(共模扼流圈、铁氧体磁珠等)
2-3.总结
在此次评估中,由于无法充分屏蔽来自DC-DCC转换器模块的辐射,因此我们无法确认插入滤波器的效果。但是,选择滤波器的要点有以下①~③:
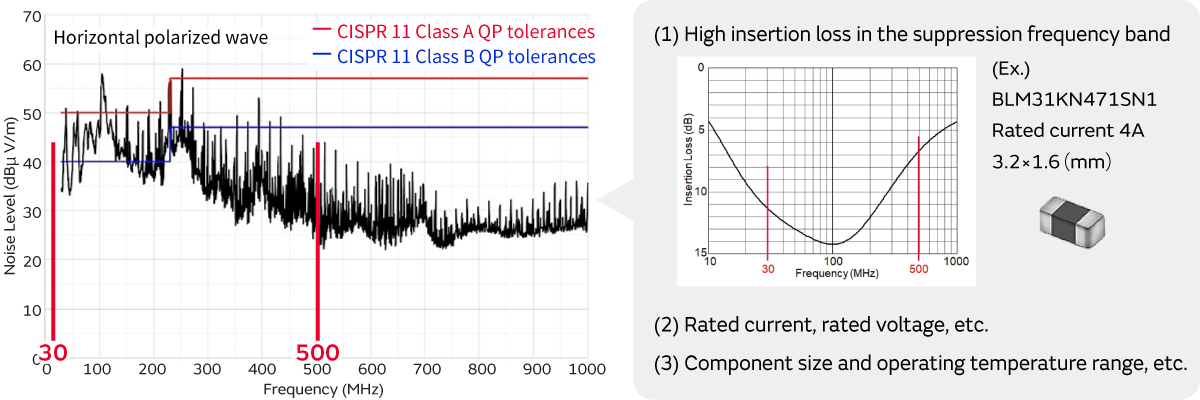
机器人的辐射噪声在多数情况下容易在30MHz至500MHz产生问题,因此着眼于该频带的噪声滤波器建议能获得更好的效果。
- 继续阅读:机器人发射对策方法-2(2/4)