机器人发射对策方法-2(2/4)
到目前为止,我们已经介绍了使用市售多轴关节机器人进行的辐射噪声对策事例,但可以想象还有许多其他情况下的噪声也会成为问题。
在这里,我们将介绍3个预设会发生的机器人噪声问题的事例。
3. 模拟机器人的发射对策(传导噪声)
3-1.(事例)市售DC-DC转换器测试电路板的传导噪声评估
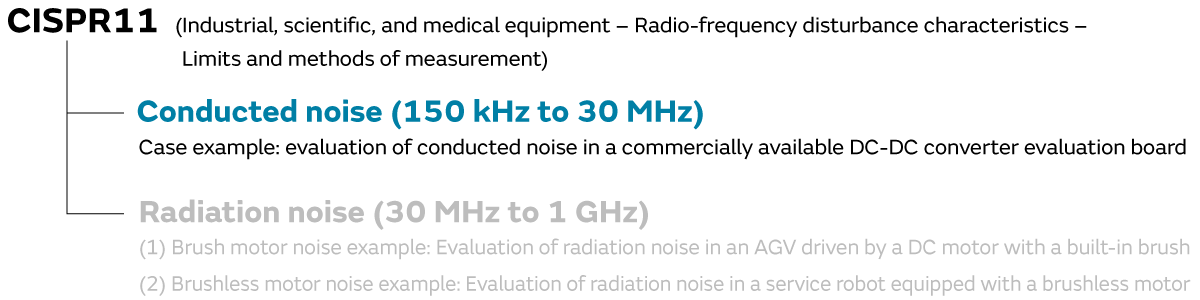
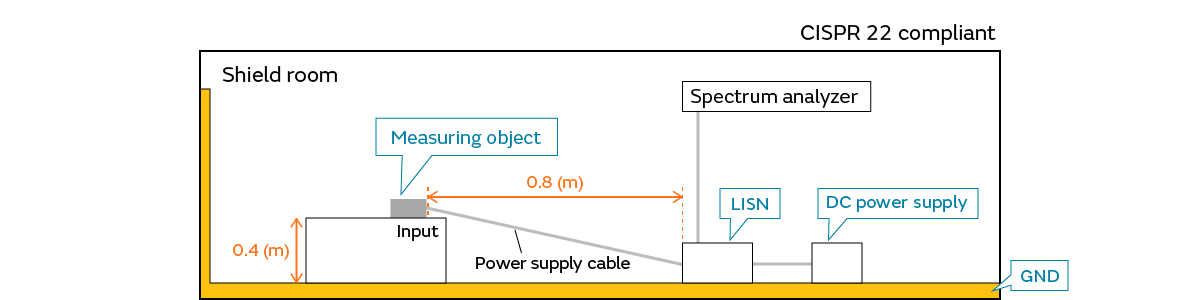
CISPR11管制的传导噪声是通过泄漏到AC电源线的共模电压来测量的。
在这里,传导至AC电源线的噪声似乎大多是由DC-DC转换器的开关引起的。
我们使用DC-DC转换器的测试电路板对噪声进行了评估。

以下是测到的传导噪声。在500kHz开关频率的倍数频率下观测到了噪声频谱。其中包含超过了CISPR11 class A group1(工业环境)的噪声允许值的噪声。这个结果并不特殊,在大多数情况下,如果设备没有针对由DC-DC转换器的开关引起的噪声(开关噪声)采取对策,基本都会出现开关噪声传导至AC电源线的问题。
因此,如果机器人成了公共噪声标准的适用对象,就需要对机器人采取预防噪声传导至AC电源线的对策。
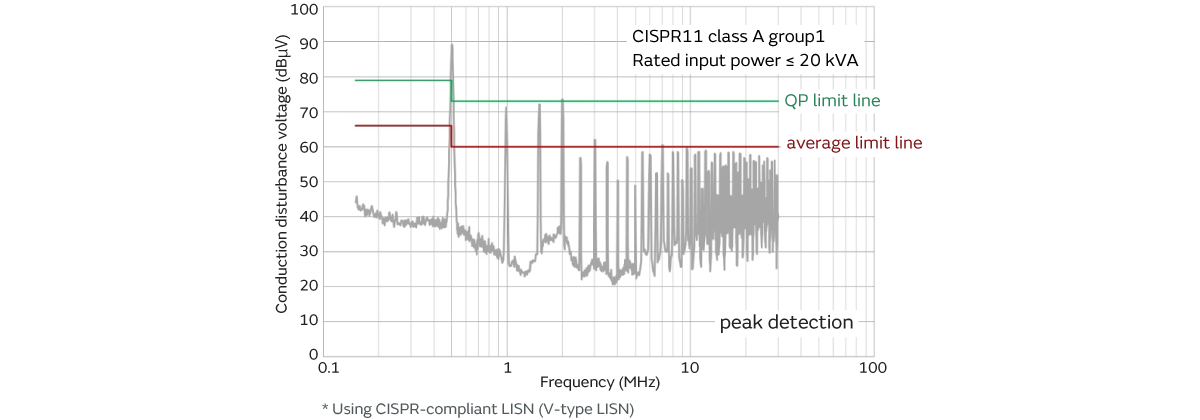
- 在500kHz开关频率的倍数频率下产生噪声频谱。
- 噪声源:DC-DC转换器(开关噪声)
- 路径:噪声传导至输入DC电源线(DC+、−)
3-2. 传导噪声的模式分离(分离为差模/共模)
我们已经确认了需要针对传导噪声采取对策(需要采取对策以满足噪声规格),因此对传导噪声进行了模式分离,以确认噪声倾向。这里所说的噪声分离指的是将电压分离为差模电压和共模电压。这种模式分离是使用三角型LISN(三角型模拟电源电路网络)来进行的。
※如果查看CISPR噪声规格,会发现其中规定了使用V型LISN,所以用三角型LISN测试的结果不能用来确定是否符合噪声规格。机器人的噪声规格仍在制定中,但很可能会使用V形LISN。在此,为了了解噪声的倾向,我们使用的是三角型LISN而不是标准中规定使用的V型。
进行模式分离后,我们发现差模噪声在全部频带都很大。因此,需要使用能够抑制差模噪声的滤波器采取对策。
※在本事例中,差模噪声占主要地位,因此即使使用共模扼流圈那样只能抑制共模的滤波器,也无法阻止传导噪声。
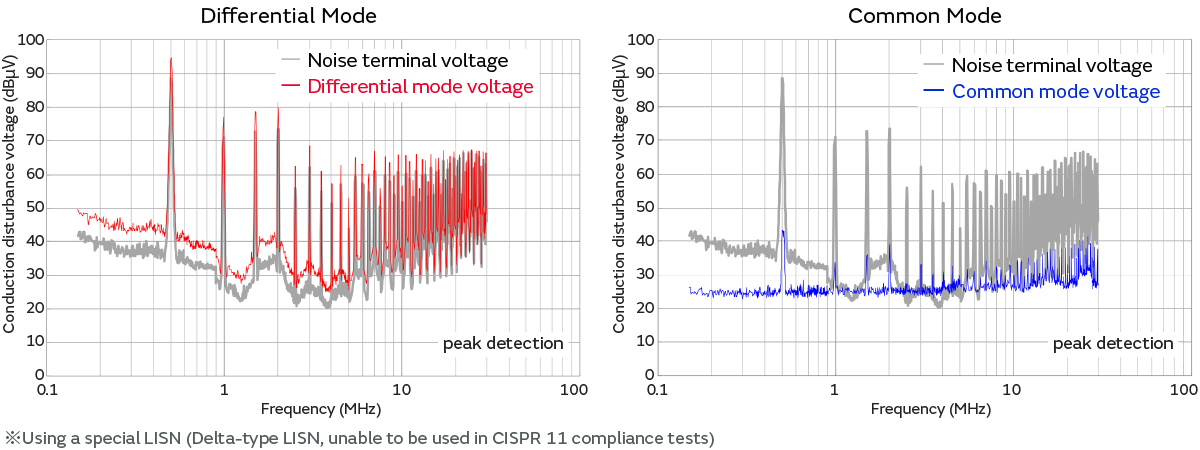
- 在全部频带中,都会受到差模电压的影响。
- 事实证明,需要针对差模的噪声对策。
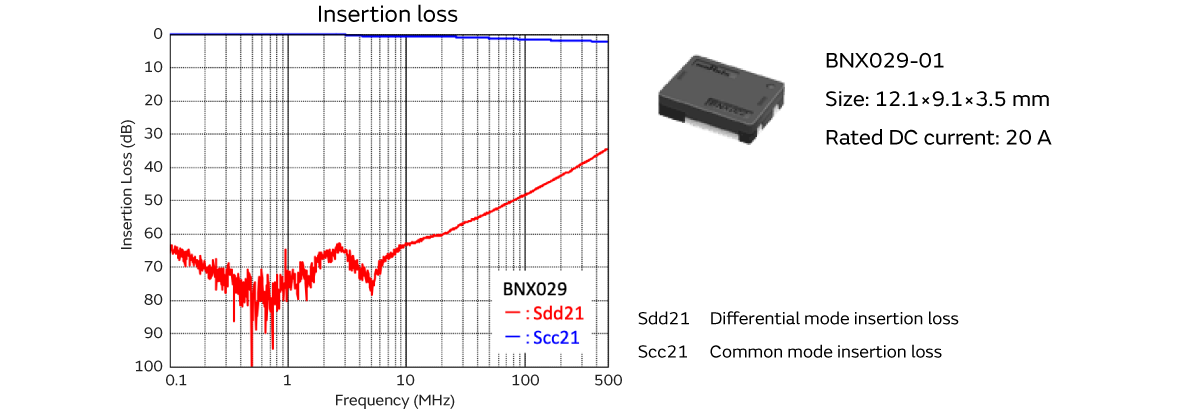
本事例的电源电路中的传导噪声在全部频带均以差模为主。采用块型EMIFIL BNX029-01构成的滤波器可阻止差模电压。
(选择BNX系列的理由)
LC的π型滤波器是抑制150kHz~30MHz频带内的差模电压的代表性滤波器结构。例如,如果构成这种LCπ型滤波器,则可以用470uF的电解电容器和1mH的电感器来构成。另一方面,在机器人等的电源当中,从节省空间、减少零件数量和高可靠性的观点来看,电解电容器等元件并不是首选。因此,我们选择块型EMIFIL BNX029-01作为满足上述要求事项的滤波器。
通过将BNX插入DC线,我们成功地在所有频带大幅抑制了差模电压。
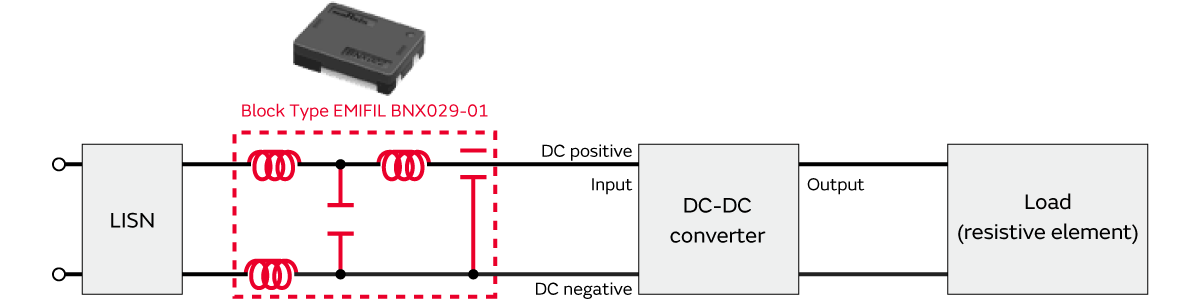
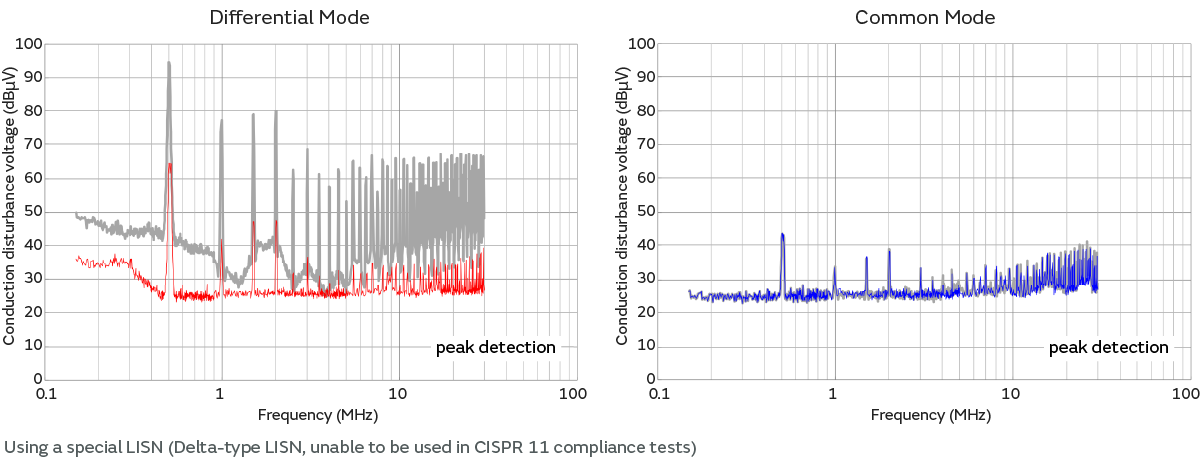
- 能够在全部频带大幅阻止差模电压。
我们使用被认为会用于噪声管制的V型LISN测量了噪声对策前后的传导噪声。
通过将BNX插入DC线路,能够在全部频带满足CISPR11的噪声允许值要求。我们可以像这样将传导噪声进行模式分离并通过重点对引起传导噪声的模式采取对策来实施有效的噪声对策。
通过使用此类对策方法,不仅可以缩短实施对策所需的时间,而且可以选择不需要返工的滤波器结构。此外,由于可以根据数据而不是经验和直觉等不确定信息来采取对策,因此无论使用哪种电源电路,都可以花费很少的时间来采取噪声对策。
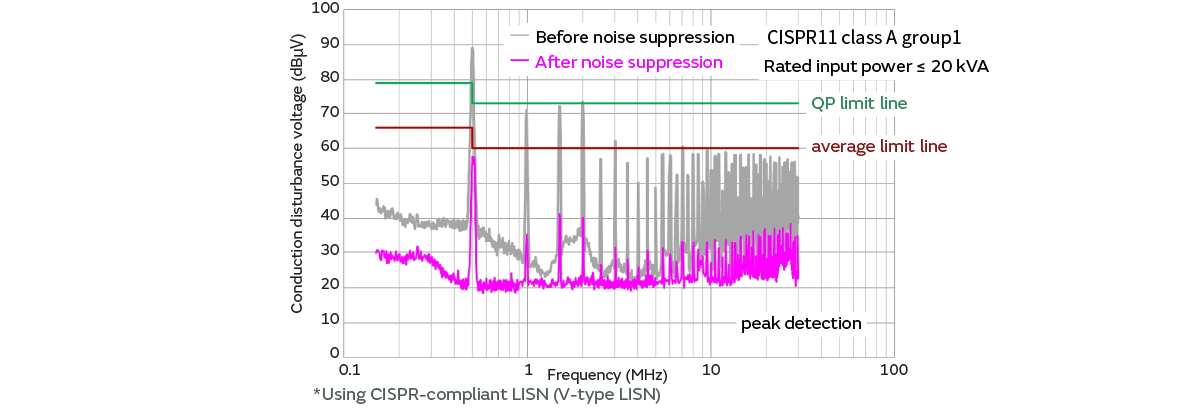
- 通过阻止差模满足噪声允许值要求。
3-3. DC-DC转换器的噪声对策总结

- 继续阅读:机器人发射对策方法-3(3/4)