加速度传感器


在前篇中,我们介绍了村田制作所(以下称“村田”)利用其惯性传感器所具备的低噪声、高感度、高稳定性的特长,正在进行可应用于高级驾驶辅助系统(ADAS)及无人驾驶汽车控制的技术开发。村田一直以来都致力于提高汽车传感器供应所需的安全性和可靠性,确保稳定的供应体制等。然而,在未来由系统掌管人身安全的无人驾驶汽车方面,惯性传感器需具备比目前更高的安全性和可靠性。在后篇中,我们向负责产品开发的工程师们询问了为实现用于无人驾驶汽车的更安全可靠的传感器,村田正在进行怎样的努力。
――为了实现无人驾驶汽车,你们正在通过哪些技术开发工作来提高惯性传感器的安全性和可靠性呢?
首先,为了提高惯性传感器元件本身的精度,必须在结构设计上下一番工夫。另外,对于从接收自传感器的信号获取检测位置的必要信息时的信号处理,也需要实现可应用于无人驾驶的高精度,以及可承受恶劣环境的稳定性。
在信号处理方面,我们还进行了安全性和可靠性方面的处理,确保在接收自传感器的信号中掺杂了异常信号时,可以判断是应该将其作为噪声忽略,还是作为错误处理。为了进行适当的处理,我们需要开发一套处理方法,在考虑所使用的传感器的特性的基础上,确保能够满足客户提出的技术要求。进行这些信号处理的半导体晶片(ASIC)和固件都是由村田独自开发的。
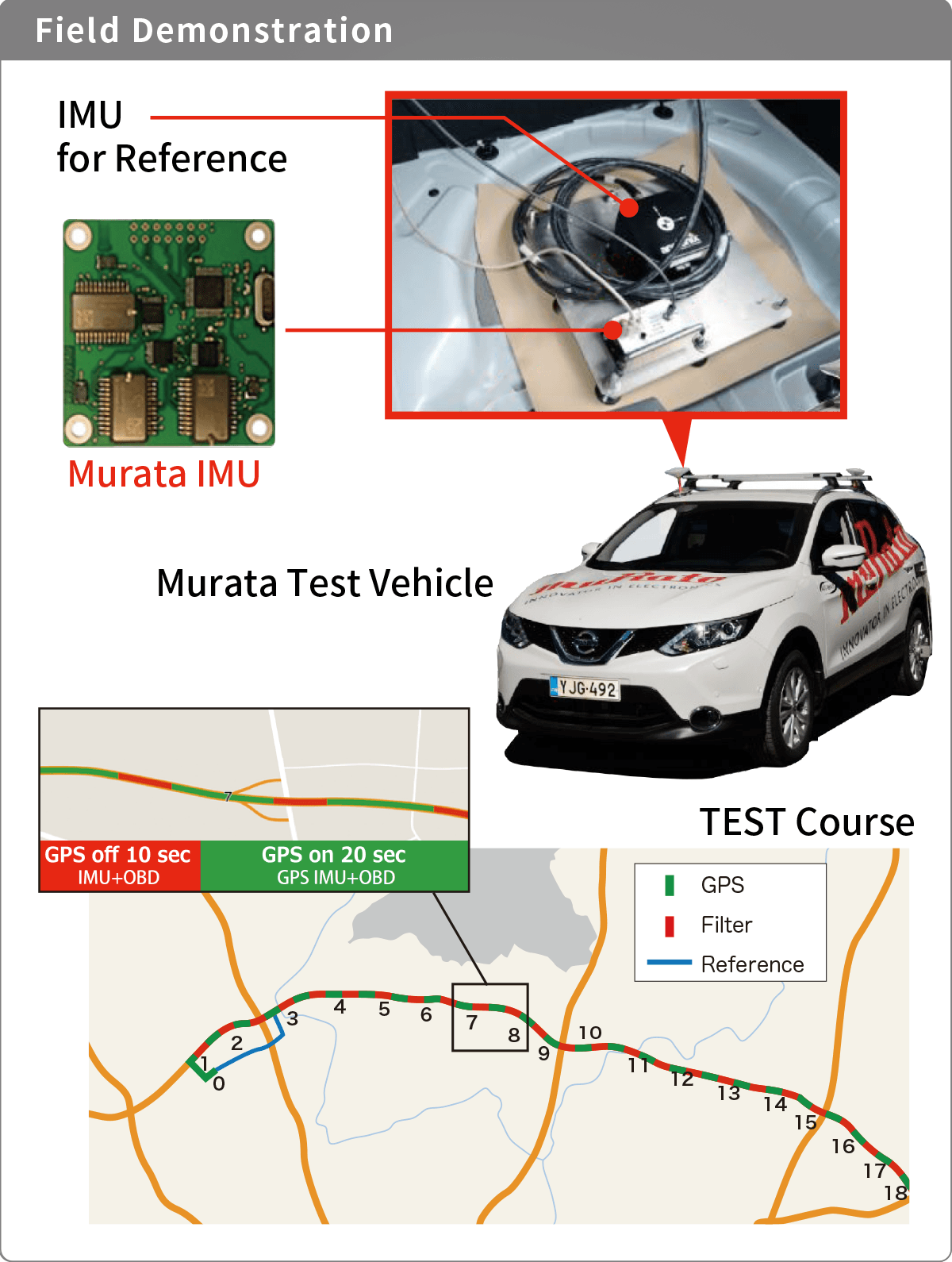
在性能安全方面,也需要加大开发力度。惯性传感器是正确了解汽车位置和方向所不可或缺的元件,必须要确保其性能万无一失。因此,客户会制作将多个惯性传感器安装在一起的冗长结构的惯性测量单元(Inertial Measurement Unit:IMU),以保证其中一个传感器出现问题时整体性能不会失灵。实际安装到汽车上时,有时可能也需要将安装了村田的传感器的控制模块和其他模块组合到一起整合系统。我们需要将这种利用方法也考虑在内,理解运用传感器特性的使用方法和信号处理,以及客户的使用方法,努力制造便于使用的传感器。
――为安全的无人驾驶汽车提供辅助作用的传感器的开发原来不仅限于元件呢。为了实现更加安全的系统,你们正在进行哪些工作呢?
我们使用已经开发的惯性传感器试着制作了IMU,并将其实际安装到汽车中,然后在芬兰进行了公路测试。目前我们正在验证测试效果,同时正在加强元件和系统的开发。
在实际测试中,我们让汽车在高速公路上以时速80km,在一般公路上以时速40km行驶,其间反复GPS开启20秒、关闭10秒的过程,以验证仅依靠惯性传感器让汽车自行行驶时会产生多少误差。目前,我们已检测出汽车即使在关闭GPS的状态下自行行驶,在高速公路上的实际位置误差能保持在30cm之内,而在路面状况较差的一般公路上也能保持在50cm以内。也就是说,这种误差不会超出车道范围。
但是,即使已经证实汽车可以在10秒内自行行驶,也还不能将惯性传感器运用于无人驾驶汽车。因为在现实的道路上,会有一些地方在很长一段距离内都接收不到GPS信号。
比如,首都高速公路中央环状线上的山手隧道全长约18km。即使事先设想了在遇到危险情况时汽车会靠到路肩避难或紧急停止,仅依靠惯性传感器进行无人驾驶的精度也至少需要保持数公里。换算成时间的话,仅依靠惯性传感器自行行驶时,至少需要维持几分钟的时间。另外,实际行驶时会接收许多外界干扰噪声,对于这一点也必须采取相应措施。
――今后,村田的惯性传感器会实现怎样的进步,并会在哪些领域中扩大应用范围呢?
刚才提到了山手隧道,如果仅依靠惯性传感器行驶完全程,需要汽车能保持10分钟以上的高精度位置检测。就算使用价格不菲的航空器用光纤陀螺,也不能保证能否实现这一点。我们目前考虑的方法是提供可达到这种精度并且价格合理的MEMS惯性传感器,为此我们将不懈努力。
此外,我们认为随着无人驾驶汽车的普及,运用于其中的技术在成熟后也可以带动农业机械和建筑机械的革新。实现无人驾驶后,农业机械就能减少机体体积,并根据农作物的生长状况和耕地状态进行极为细化的农业生产。我们在今后的技术开发过程中也会考虑到这些无人驾驶汽车技术在其他领域的应用。
我们预感在不久的将来,无驾驶员的完全无人驾驶汽车将作为生活、商业及社会活动的辅助工具得到普及。但是,在此之前还有许许多多的技术难题有待解决。其中一个难题就是惯性传感器的高精度化、安全性和可靠性的提高。
负责开发惯性传感器的村田的技术人员们将继续提高技术,通过提供高精度、便于使用的传感器为社会发展作出贡献。对于村田推动无人驾驶汽车进步的技术开发,今后也请拭目以待。
