Accelerometers


In Part 1, we explained how Murata Manufacturing Co., Ltd. ("Murata" hereafter) has been using the low-noise, high-sensitivity, and high-stability features of its inertial force sensors to develop technology for use in advanced driver assistance systems (ADAS) and control of self-driving cars. Murata is striving to improve the safety and reliability levels needed for supplying automobile sensors and also to ensure a stable supply system. However, in the self-driving car of the future where a person's life is entrusted to the system, the safety and reliability of inertial force sensors must be even higher than the current level. In Part 2, we asked the engineers involved in development about what Murata is doing to develop sensors with even higher safety and reliability for self-driving cars.
--What types of technology development is being conducted to realize self-driving cars, and how is the safety and reliability of inertial force sensors being improved?
First, to improve the accuracy of the element itself of the inertial force sensor, innovations are needed in the structural design. In addition, signal processing when obtaining the information required for position detection from the sensor signals must also be implemented at a high accuracy suitable for automated driving and with a stability that can withstand harsh environments.
In signal processing, if abnormal signals are mixed in with the signals acquired from the sensor, the determination of whether to ignore it as noise or to execute error processing is treated as a process related to safety and reliability. To process the signals properly, processing methods must be developed that meet the technical requirements given by the customer while also taking into account the characteristics of the sensor being used. Murata has developed its own semiconductor chips (ASIC) and firmware for executing this signal processing.
Some innovations must also be incorporated for functional safety. Inertial force sensors are elements required for accurately obtaining the position and direction of the car, and they must remain functional no matter what the situation is. For this reason, customers must produce inertial measurement units (IMUs) with a redundant configuration where multiple inertial force sensors are installed in the car so that the entire functionality is not lost even if one IMU fails. When installing in a car, a control module where Murata's sensor is installed may be combined with another module in an integrated system. Taking into account this implementation method, we must understand how to process signals, how to use the sensors based on their characteristics, and how they will be used by the customer for developing a user-friendly sensor.
--The development of sensors that support safe self-driving cars does not stop at the development of elements. What are you doing to develop safer systems?
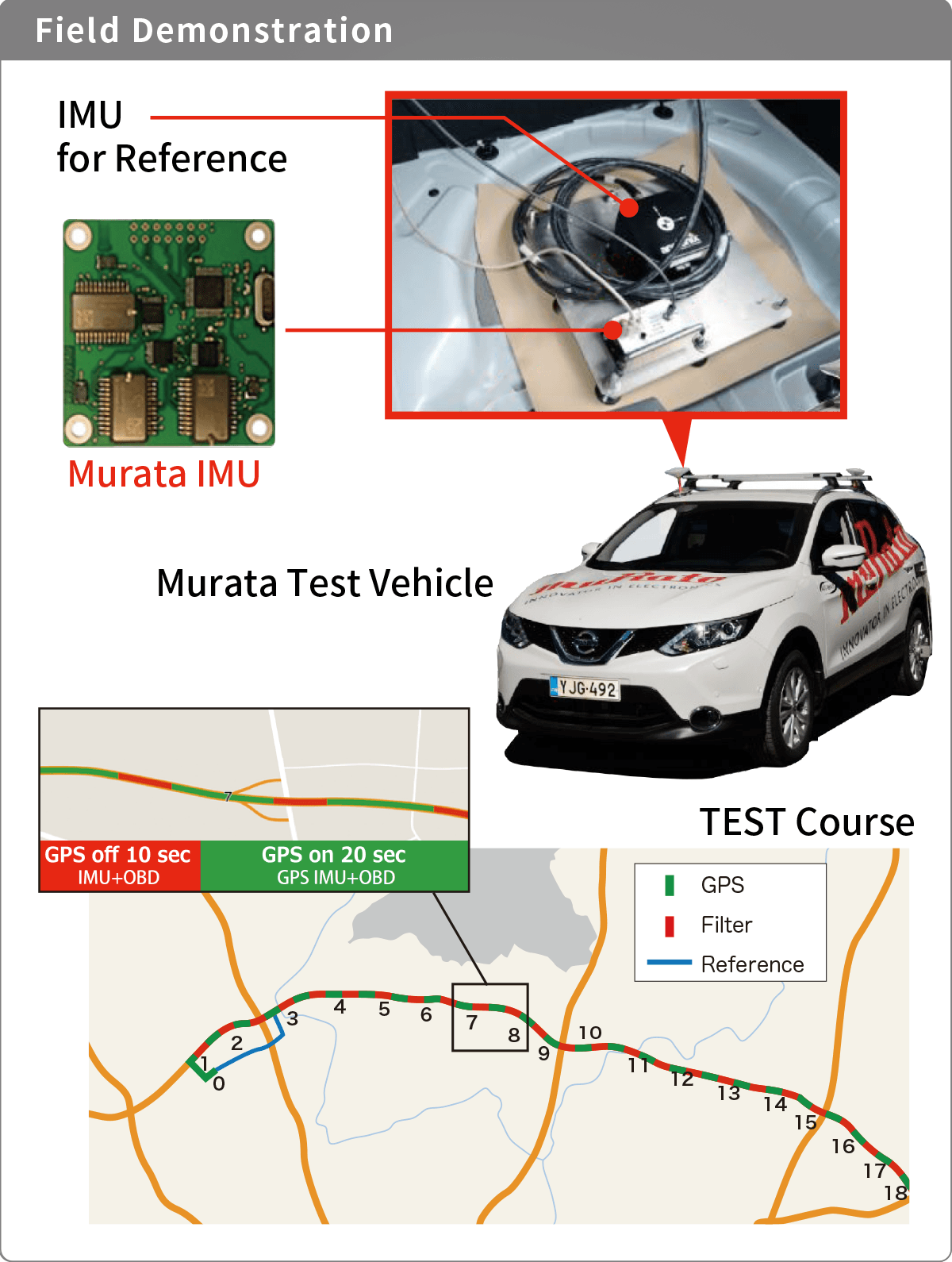
The developed inertial force sensor was used to develop an IMU prototype and install it in an actual car. Then, a public road test was conducted in Finland, and the results were verified and incorporated into the element and system.
In field testing, when the car is allowed to drive autonomously using only the inertial force sensors, the amount of error was verified for a state where a GPS-on status for 20 seconds and GPS-off status for 10 seconds were repeated while running at 80 km/h on a highway and 40 km/h on a regular road. Currently, even for autonomous driving with GPS off, we have been able to detect positions within an actual error of less than 30 cm on highway roads and less than 50 cm on public roads with poor surfacing conditions. This error can be said to be within the range where a car would not come out from the traffic lane.
However, just because we have verified the capability of the sensors for a period of 10 seconds still does not mean that they can be used for self-driving cars. Actual roads have areas where GPS signals cannot be received for extremely long stretches.
For example, the Yamate Tunnel along the Central Circular Route of the Metropolitan Expressway in Tokyo has a total length of 18 km. When a hazardous situation occurs, even if the car pulls over onto the shoulder or makes a sudden stop, it must have an accuracy that enables autonomous driving using only inertial force sensors for a range of at least several kilometers. In terms of time, this means that the car must be able to maintain autonomous driving using only the inertial force sensors for several minutes. Also, in actual driving, a variety of noise disturbances can enter, and so protective measures against noise are also necessary.
--Going forward, what advances do you think will be achieved in Murata's inertial force sensors, and what applications will their use spread to?
To drive through the entire length of the Yamate Tunnel using only inertial force sensors would require position detection to be maintained at a high accuracy for at least 10 minutes. The necessary level of accuracy needed to make it through the entire tunnel is difficult even if using the extremely high-cost fiber-optic gyros intended for aircraft. Because of this, we are vigorously pushing to develop an MEMS inertial force sensor at a reasonable cost at this level of accuracy.
As self-driving cars become prevalent, and the technology used becomes mature, we think that this will spur innovations in agricultural equipment and construction equipment. If agricultural equipment becomes self-driving, the machine body will have a more compact size, and detailed agricultural tasks could be performed based on the growth of the crops and state of the cultivated land. We want to conduct our technology development while also including applications for self-driving car technology to other fields in our vision.
In the near future, fully self-driven cars without a driver will become widespread and be a presence that sustains our daily lives, business, and social activities. However, there are still many technical issues that must be resolved before we reach that point. One of these issues is improvements in accuracy, safety, and reliability of inertial force sensors.
The Murata technical teams involved in development of inertial force sensors are improving their technical expertise to enable them to provide advanced sensors in a user-friendly, finished form for contributing to the development of society. Going forward, you can expect great things from Murata's technology development that supports the ongoing advancements in self-driving cars.
