

NFZ2HBM

ノイズ対策技術 / 事例紹介(民生)
INDEX
次に、無線通信電波の近接照射イミュニティ試験を行いました。本試験は公的なノイズ規格がないため、独自の測定系を構築して行いました。
LTEやWi-Fiの通信電波を想定した700MHz-2600MHzの周波数帯で、100MHzごとに10MHzステップで電波を放射し、モーターの挙動が変化するかどうかをモーター回転数や消費電流で確認しました。
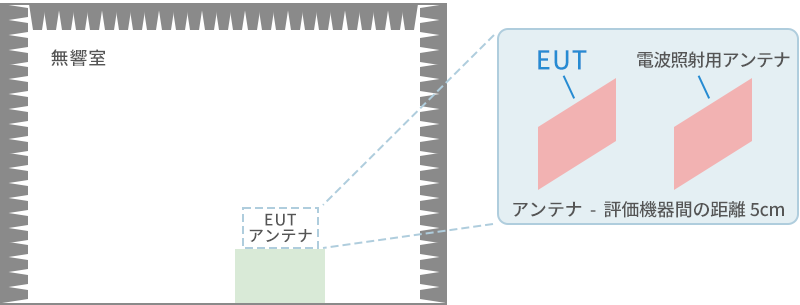
照射した電波周波数帯:700MHz~2600MHz(LTEや無線LANの通信電波を想定)。100MHzごとに、10MHzステップでイミュニティ評価を実施
照射した電界強度:10V/m以上、各周波数で5秒照射、パルス変調 0.2kHz、Duty50%
近接距離:5cm
広帯域スリーブアンテナを使用(型番 NKU07M32G、NoiseKen製)。
モーターは、1サイクル(正回転1.5秒、負回転1.5秒)を連続運転したメインIC内部のカウンタをモニタリングして、モーター回転数とモーター消費電流を測定。
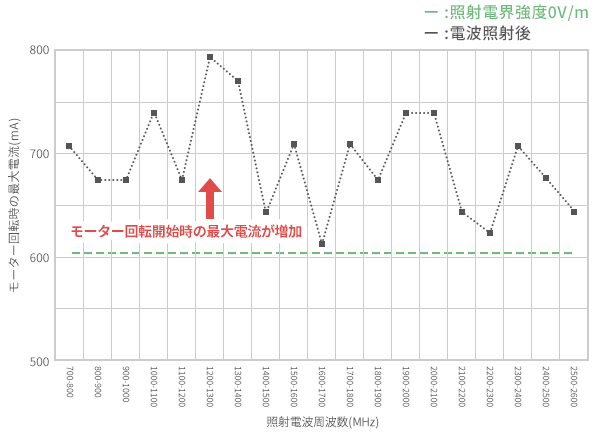
下図の左側は、モーターが通常動作をしているときのモーター回転数と電流波形を示しています。回転数を見ると、1.5秒ごとに正回転と逆回転を繰り返しているのがわかります。一方、電流波形を見ると、特徴的な変化をしています。モーターの回転方向が切り替わる瞬間に大きな電流が流れており(この例では605mA)、それ以降は小さな電流(100mA)に落ち着きます。イミュニティ試験を行った際、この反転時の電流の最大値が増加しました。外部のノイズの影響を受けていることがわかります。また、この変化量は照射した電波の周波数によって影響度が異なっていました。
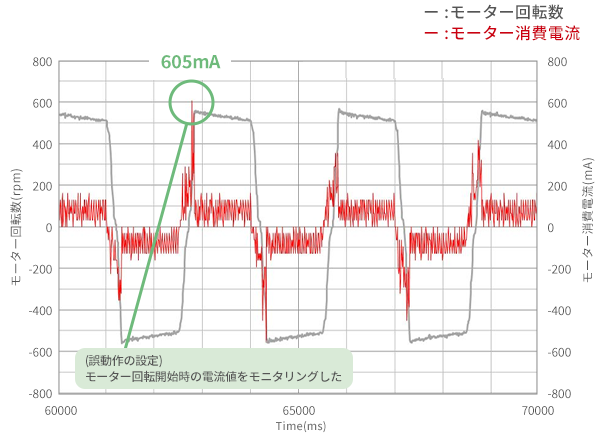
※初期状態でのモーター回転数と消費電流
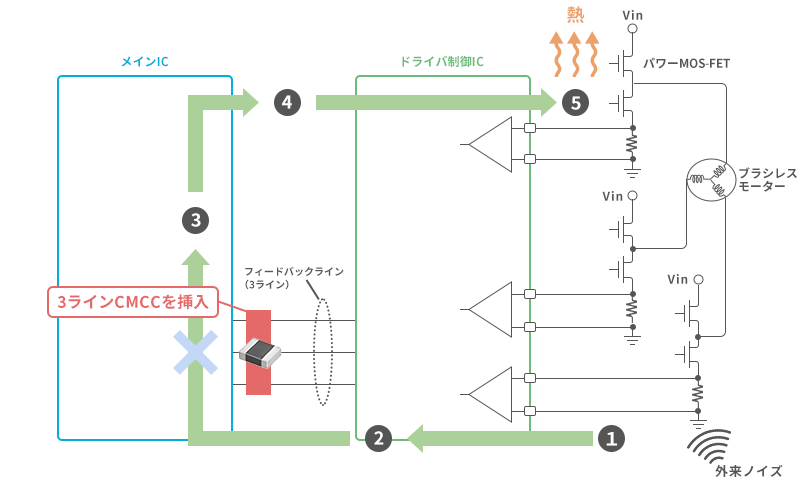
この問題は次のような仕組みで発生していると想定されます。
外来電波がノイズとして照射された際、ノイズが基板配線などにコモンモードで結合します。モーターは基板上に実装されたメインICで動作がコントロールされており、モーターとメインICの間にはフィードバック回路が構成されているため、コモンモードで結合したノイズがフィードバック信号に重畳されます。ノイズの混じったフィードバック信号がメインICに入力されるとIC内部でコモンモードの一部のノイズがディファレンシャルモードに変換されます。ノイズが混じり誤った値でフィードバックを受けたメインICは誤った制御信号を出力してしまいます。この事例ではモーターの回転のために必要な量以上の電流が流れたため、過剰な分の電流は無駄なエネルギーとして消費されてしまっています。
このような場合、メインICに入力されるフィードバック信号からコモンモード成分のノイズを除去することが有効です。三相モーターのフィードバック信号は3ラインで構成されるので、3ラインが結合したコモンモードチョークコイル(CMCC)を使用することになります。
コモンモードチョークコイルを適用して同様の評価を行ったところ、モーターに流れる最大電流の増加分が大幅に低下しました。
これにより、外来ノイズが侵入してもモーターの制御が乱れることが防げます。また、余計な電流が流れないため、バッテリーの容量が無駄に減ることも防ぐことができます。
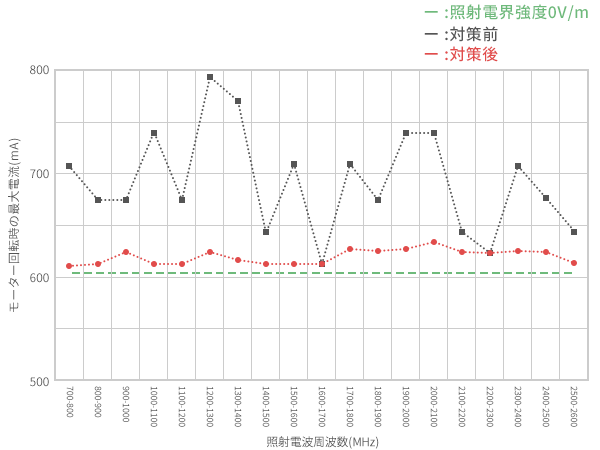
3ラインCMCCを追加すると、最大電流が低下。メインICの誤動作を抑制できる
バッテリー寿命がのびる、省エネになる
サービスロボットは家庭環境などで使用されるため、ノイズ対策は重要です。エミッション問題としては、モータードライバで発生したスイッチングノイズが放射して起こるものが注目されます。イミュニティ問題では、外来ノイズがドライバのフィードバック信号ラインに侵入して、あやまった制御信号をモーターに伝達して誤動作することがあります。
小型で大電流に対応したノイズフィルタです。ノイズの周波数にあわせて定数を選択します。
最大11Aの大電流に対応。最高使用温度150°Cで使用箇所を選びません。
ノイズの周波数にあわせて商品を選択します。

