Productos de supresión de ruido / Filtros de supresión EMI / Dispositivos de protección ESD
Guía de filtros de supresión de ruido
En la lección anterior nº 2 se explicaba que el ruido, que es un problema para los dispositivos digitales, está causado principalmente por los componentes de alta frecuencia (RF) de las señales digitales. Por esta razón, se entiende que los filtros de paso bajo, que permiten el paso de señales de baja frecuencia pero no de señales de alta frecuencia, pueden utilizarse para eliminar este ruido.
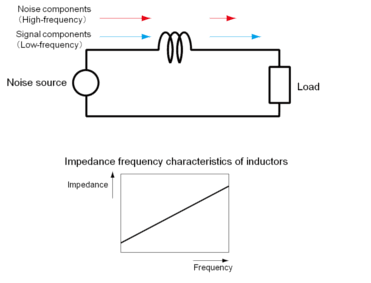
Los elementos de circuito que funcionan como filtros de paso bajo incluyen inductores (bobinas) y condensadores. Como se muestra en la Fórmula 1, los inductores tienen baja impedancia (una característica parecida a la resistencia: a medida que aumenta la impedancia se hace más difícil que pasen las señales) con respecto a los componentes de baja frecuencia, y alta impedancia con respecto a los componentes de alta frecuencia.
Fórmula 1 |Z|=2π・f・L (Z: impedancia, f: frecuencia, L: inductancia)
Por lo tanto, la inserción de un inductor en serie en la ruta de ruido facilita el paso de los componentes de señal de baja frecuencia y dificulta el paso de los componentes de ruido de alta frecuencia.
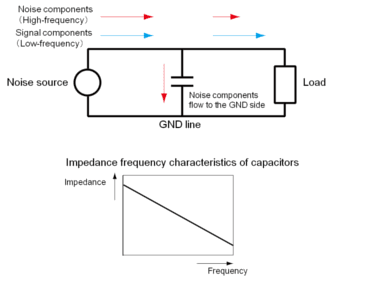
Los condensadores, por su parte, tienen las características opuestas a los inductores y presentan una alta impedancia con respecto a los componentes de baja frecuencia y una baja impedancia con respecto a los componentes de alta frecuencia.
Fórmula 2 |Z|=1/(2π・f・C) (Z: impedancia, f: frecuencia, C: capacidad electrostática)
Para configurar un filtro de paso bajo utilizando estas características, se inserta un condensador entre la ruta de ruido y la línea GND. En este caso, los componentes de señal de baja frecuencia pasan tal cual, pero los componentes de ruido de alta frecuencia escapan al lado GND que tiene menor impedancia, por lo que no pasan fácilmente por la ruta de señal.
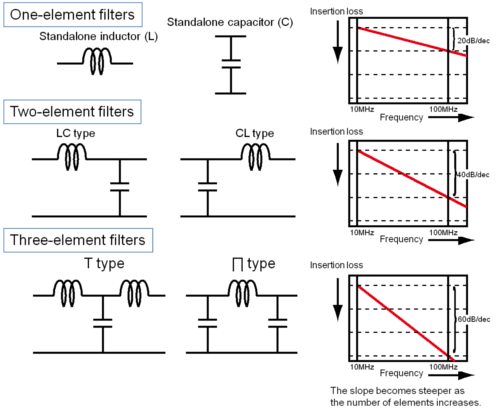
Los dos tipos de elementos anteriores son los filtros de paso bajo más básicos, y se pueden configurar filtros de paso bajo de mayor rendimiento combinando estos elementos.
La Fig. 3 muestra la relación entre el número de elementos que componen el filtro y las características de frecuencia del filtro. La pérdida de inserción indica el grado de atenuación de la señal debido al filtro, y la cantidad de atenuación aumenta de arriba a abajo en la figura. La figura muestra que la pendiente de las características de frecuencia se hace más pronunciada a medida que aumenta el número de elementos del filtro. Los filtros con pocos elementos tienen características de frecuencia con una pendiente suave, por lo que tienen una baja selectividad con respecto a qué frecuencias atenuar y qué frecuencias pasar. Como resultado, puede que se atenúe parte de la señal o que el ruido no se reduzca lo suficiente. En cambio, los filtros con más elementos tienen características de frecuencia con pendiente pronunciada, por lo que presentan una alta selectividad de frecuencias y pueden eliminar el ruido sin atenuar significativamente la señal.
La mayoría de los filtros de supresión de EMI se crean sobre la base de este enfoque de filtro de paso bajo, y se utilizan diversas técnicas para aumentar los efectos de eliminación de ruido.
En la siguiente columna se presentan los filtros de supresión de EMI típicos.
*La información presentada en este artículo es la vigente en la fecha de su publicación. Tenga en cuenta que puede diferir de la información más reciente.