Accelerometers


The era of self-driving cars traveling on city streets is fast approaching. There are great expectations for the practical application of self-driving cars as solutions to many social issues, such as securing safe means of transportation, and reducing traffic congestion and accidents. However, it is not easy to replace the advanced driving skills of a human driver with those of computers and artificial intelligence. To achieve this, it is essential to introduce cutting-edge technology.
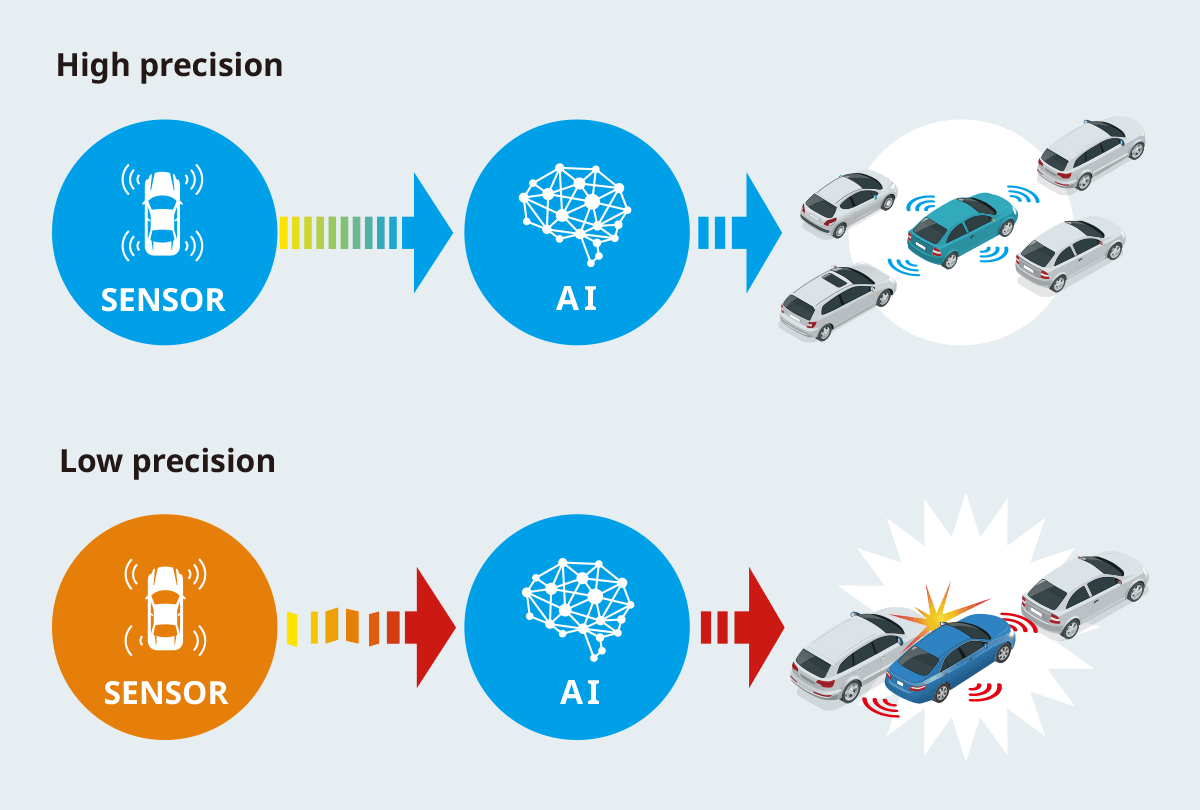
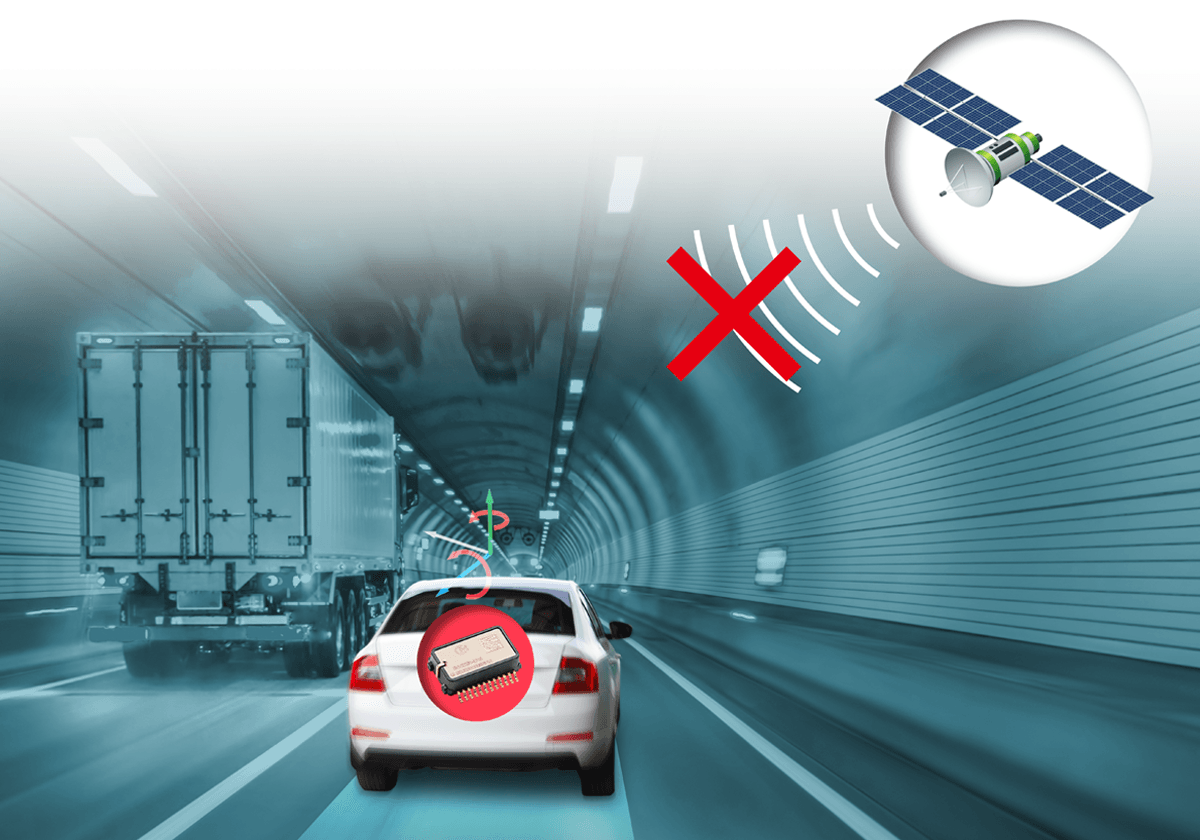
The use of artificial intelligence (AI) is generating attention as a key technology making self-driving cars a reality. Remarkable progress in AI technology has resulted in the ability to judge the driving environment with near-human accuracy. However, regardless of how advanced AI technology becomes, accurate judgment is possible only if the sensors obtain correct data on the driving environment. In that regard, the use of high-precision sensors is considered a major prerequisite for realizing safe self-driving cars. Murata Manufacturing Co., Ltd. ("Murata" below) has embraced the challenge to develop inertial force sensors that can accurately identify the position and direction of vehicles even in areas where Global Positioning System (GPS) signals do not reach, or in poor conditions where cameras and radar do not function sufficiently.
Cars with an advanced driver assistance system (ADAS) have already appeared that are capable of autonomously staying within traffic lanes. Self-driving cars will be realized through further advances in ADAS technology. However, dramatic improvements in the required technology are essential. In ADAS, the driver is responsible for ensuring safety, and the system is completely designed around supporting the driver. By contrast, for self-driving cars, starting at level 4 as determined by the (U.S.) SAE*1, the system is in charge of making driving decisions.
*1: SAE is an abbreviation for the Society of Automotive Engineers. It is a non-profit group that works to promote standardization of all vehicles. SAE defines six levels for driving control technology used in self-driving cars based on the degree of intervention by the system, ranging from level 0 (all driving is performed by the driver) to level 5 (all driving is performed by the system).
Cars encounter a wide variety of driving environments. Cars may run through tunnels, in dense fog, on roads in poor condition, and through other locations where it is difficult to assess the situation. To enable safe driving in these locations, self-driving cars are installed with GPS, cameras, radar, and a wide variety of other sensors for collecting information on the driving environment. Inertial force sensors are used to collect this wide variety of data by detecting the car orientation and direction for accurately plotting the driving path. In locations where GPS signals cannot be received, such as in tunnels, or in situations where cameras and radar are not fully functional, the purpose of inertial force sensors is to collect data for driving to prevent the car from crossing over the traffic lane and hitting the car running next to it, a guard rail, or other object.
Murata inertial force sensors use an element structure for achieving particularly high accuracy. Conventional vehicles already have attitude control sensors. However, use in self-driving cars requires even higher accuracy and safety, and enhanced functionality is also needed.
Murata is developing inertial force sensors featuring even higher accuracy, safety, and reliability while conducting a series of repeated testing using field demonstrations on public roads.
The inertial force sensor for self-driving cars must have a level of accuracy, safety, and reliability that is even higher than applied fields today. This represents an extremely difficult hurdle to overcome. We asked the Murata engineers involved in the development of the inertial force sensors to be installed in self-driving cars about the features of their sensors and the progress in technical development for realizing even further advancements.
--What features do Murata inertial force sensors have that make them suitable for improved safety in self-driving cars?
*2: MEMS is an abbreviation for Micro Electro Mechanical Systems, and it is a machine system that has 3D microscopic structures built using semiconductor process technology. To use in sensors, a microscopic structure that moves mechanically is produced, and this movement is converted to electrical signals. The movement is detected based on its size and change. In addition to sensors, it is also used as a technology for producing the display elements in screens and high-frequency components.
MEMS inertial force sensors that detect the state and motion of an object, including its acceleration and angular velocity, have two methods of manufacture: Surface MEMS and bulk MEMS. Of these two methods, surface MEMS has a structure suitable for compact sizes, and it is used for hand-shaking correction and other features in smartphone cameras. Bulk MEMS, on the other hand, has a structure suitable for high accuracy. Murata is developing sensor by focusing on bulk MEMS.
In MEMS inertial force sensors, the movable sensing unit in an element moves mechanically due to the movement of an object, and this is converted to electrical signals for detecting acceleration and angular velocity. In surface MEMS sensors, the thickness of the sensing unit is small at only 10 μm to 20 μm*3, and the signals obtained from movements are faint. Consequently, significant signal amplification is required at the circuit side, and when this occurs, noise can be noticeable. On the other hand, bulk MEMS sensors are produced by digging to a depth of 40 μm or more into the wafer to form a sensing unit that is a large 3D structure. Consequently, stronger signals than those obtained by surface MEMS at the element level can be accurately output for enabling production of an inertial force sensor with low noise, high sensitivity, and high stability. One feature unique to bulk MEMS sensors is that they are ideal for self-driving cars where a high level of safety and reliability is required.
*3: Typical value in the market
--In what types of applications are Murata inertial force sensors currently used?
Today, they are used for position detection in machine tool arms and in attitude control for industrial equipment, farm equipment and construction equipment. Even in automobiles, to increase maneuvering stability, they are used in Electronic Stability Control (ESC) systems that detect vehicle instability for stabilizing its behavior and in ABS for preventing locking of the tires during sudden braking.
--What requirements do inertia force sensors need to satisfy to be installed in cars?
Sensors for cars must have a level of safety and reliability that is even higher than that for industrial equipment. That is because there is a high risk of loss of life in the event that an accident occurs. Also, these sensors must not malfunction even when subjected to high and low-temperature environments, vibrations, or jolts. And even if an unanticipated state occurs, they must provide functional safety to ensure that a situation does not develop where safety is impaired.
--Automobile sensors must be compliant with strict standards for safety and reliability.
In addition, the factories that produce vehicle-installed sensors must have a production system based on a business continuity plan (BCP) for ensuring that the supply does not stop even in the event of an earthquake, fire, flood, or other disaster. Murata's inertial force sensors are produced primarily in our Finland factory, but we are working on expanding the mass-production lines for our major products to a second base at the Kanazawa Murata factory.
We also are ensuring 100% traceability. We have a complete after-sales support system that is capable of quick fault analysis and other suitable responses if a fault occurs in the market. When a fault occurs, using only the serial number, we can identify the chip that failed in which location and on which wafer at manufacturing for accurately assessing the product impact. This will be effective at minimizing the impact if a quality issue were to occur at the customer's site.
