
Smart Factories: Giving Form to Digital Transformation in the Manufacturing Industry
Automated Guided Vehicles (AGV) Have Evolved into Smart Autonomous Mobile Robots (AMR) and Are Improving the Efficiency of Operations in Factories
The extent to which the work time (throughput) of each process on the production line (e.g., processing and inspections) is shortened is important to enhance productivity in factories. Nevertheless, another point of improvement that cannot be overlooked is the shortening of the time for transportation between processes of works in progress and the replenishment of parts and materials to each process.
In particular, there are even some cases in which shortening the transportation time and similar contributes more to an improvement in productivity over the whole line than a shortening of the work time of each process depending on the situation in variable-mix variable-lot production in which diverse products are individually made on the same line while frequently changing production items. That is because the process of exchanging production items called "changeover" work takes a long time, as the work time of each process and the types and quantities of parts and materials used differ for each production item.
Factories do not operate ideally – transportation means capable of dealing with variations in operation are necessary
In general, transportation is performed automatically with conveyors to transport goods between processes on lines aimed at low-mix mass production. A well-known example of this is that the Ford Model T, which was the forerunner of modern industry, was efficiently assembled with an assembly-line system while moving on a conveyor by being narrowed down to one model. Even now, continuous production without stopping the line employing the same method is performed in food factories and other facilities.
If the loading and unloading locations and the throughput of each process are fixed, it is easy to synchronize the timing of work and transportation. Therefore, it is possible to optimize transportation with conveyors. However, work and transportation often do not proceed at the expected pace. In that case, congestion arises on the line. In the worst case, the entire line must be stopped and it becomes necessary to wait until the delayed work is completed.
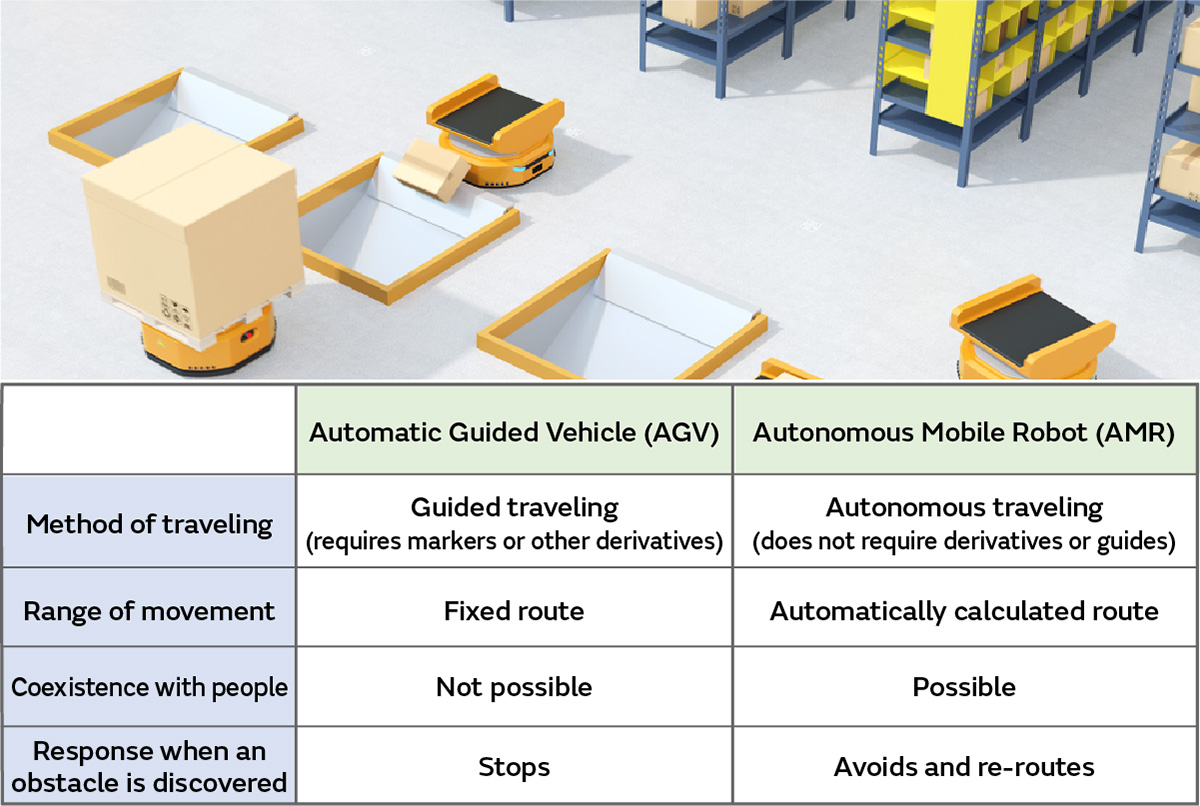
Since the 1990s, automatic guided vehicles (AGVs), which move on transport paths guided by rails, magnetic markers and similar, have become widely used in the transportation of products, parts, and materials in the production process in place of conveyor belts (Fig. 1). The transport route at the time of transportation is predetermined with AGVs. However, it is possible to adjust the quantity of things being transported and the timing at which they are transported relatively freely. Therefore, it is possible to deal with work delays and other problems due to small malfunctions in each process. There has also been the appearance of some AGVs equipped with a robot arm to be able to automatically pick up and put down goods in recent years. AGVs have further evolved into smarter autonomous mobile robots (AMR) in anticipation of the arrival of the smart factory era.
Means to be able to transport the necessary things in a timely manner in variable-mix variable-lot production is necessary
However, situations may arise that even AGVs cannot handle in variable-mix variable-lot production. This is because transportation with AGVs is not a good fit with the cell production lines that suit variable-mix variable-lot production.
One worker handles the work of multiple processes on cell production lines. Therefore, the frequency of transporting works in progress can be comparatively reduced. However, that does not mean all processes can be handled by one person. Although not much, there is loading and unloading work. Furthermore, it is necessary to deliver the necessary parts and materials for the production of the next product in advance when changing production items.
In general, multiple workbenches are lined up and workers are placed at each of them to produce products on cell production lines. The loading and unloading of works in progress and the replenishment of parts are performed in a timely manner to suit the state of progress of each workbench. This means it is necessary to have the transportation means to be able to freely set the loading and unloading locations and timings like a taxi instead of an AGV for which the route and operation schedule is predetermined like a railroad or fixed-route bus. Moreover, AGVs move in places where workers are found on cell production lines. Accordingly, it is necessary to realize a high level of safety that was not needed with AGVs for which the transport path can be isolated.
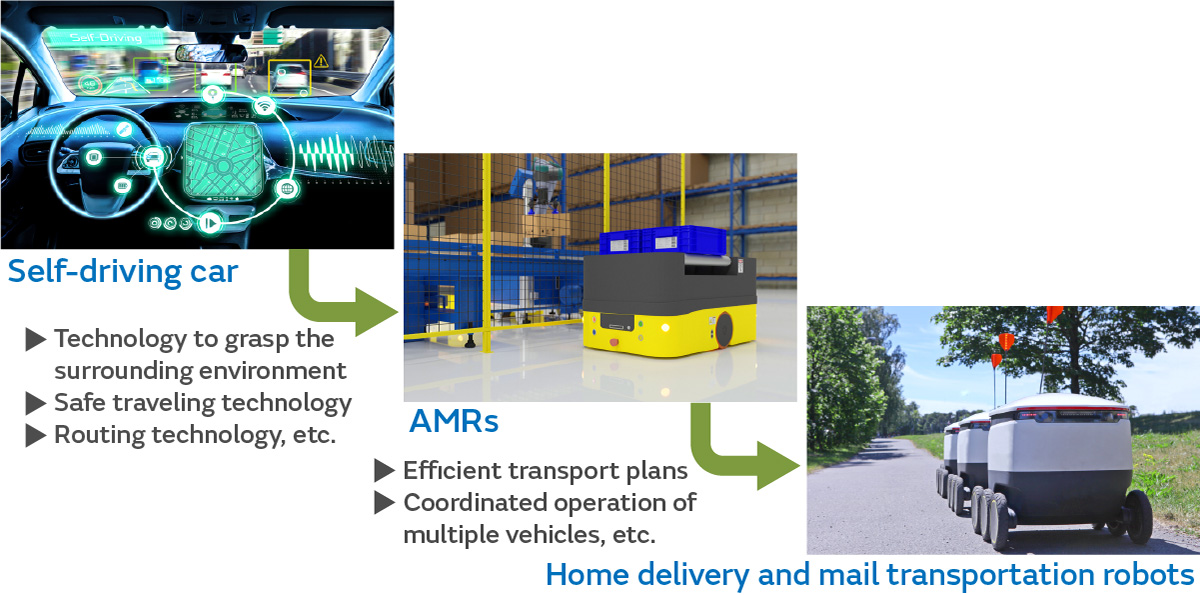
AMRs that transport things while changing the movement route to suit the situation have come to be used in places with people as a transportation means to solve such issues. AMRs automatically recognize the positions of systems and other things that become obstacles in transport routes with sensors and then remember them as a map in advance. They then move safely while detecting the positions and movement of people in factories with sensors during transportation. The traveling environment and speed differ, but AMRs can be said to have the same functions as self-driving cars that are being developed by the automobile industry (Fig. 2). It is also expected that AMR technology will expand to automatic delivery and other functions for home delivery, mail, and other services in addition to being used in factories.
Smart transportation of needed parts by forecasting the progress of work a little ahead of time
Also important is how effective and efficient it is to operate AGVs, AMRs, and other transportation means.
The ideal is to operate "just in time,” in other words to be able to transport goods in a timely manner as necessary to minimize the inventory of works in progress and parts, materials, and other goods before assembly. It is also important to locate the movement route to be able to load and unload goods in the shortest time if the transport route changes depending on the situation like with AMRs. However, it has become possible to find the optimal operation method while grasping the situation over the whole of the factory thanks to the development of IoT, AI, and other information processing technologies.
First, it has become possible to accurately grasp the progress status of work at each workbench on cell production lines and the status of the inventory of parts and materials with IoT. The situation was conveyed with slips called "kanban" until now. Digitizing this means it is now possible to discover standstills in work that will occur a little ahead of time and to derive the method to deal with that based on the situation in the factory grasped in real time.
Furthermore, until now, the parts and materials necessary depending on the production item have been picked up by hand from the shelves of warehouses and then placed on transport vehicles for delivery in factories and other facilities performing variable-mix variable-lot production. It is now the case that transportation robots move the shelves where the necessary parts and materials are placed to where the people who will pick them up are while referring to the digitized kanban information to ensure delivery in the shortest time possible.
Related articles
- The Inseparable Relationship Between Digital Transformation and Decarbonization and Technologies Essential for a Sustainable Manufacturing Industry
- From automation to autonomy and collaboration, manufacturing robots are advancing to become smarter
- From Field Networks to TSN: The Evolution of Telecommunications Infrastructure in Factories