Broadening Utilization of Point Cloud Data: The Development, Widespread Adoption, and Many Applications of Devices Such as LiDAR-Equipped Scanners
The concept of the point cloud, which is now an important part of the essential technological foundations that support aspects of social infrastructure such as construction, civil engineering, and manufacturing, had already been proposed as early as the 1970s. At that time, point clouds, collections of coordinates or points, were used to express the topography of features on the Earth's surface, and the technique's main application was in the field of topographical surveying.
Subsequently, point cloud technology began to advance from the 1990s onward with the use of GPS, and it made rapid strides in the 2010s and after. Reasons for this include the availability of faster computers and the accompanying development of new analytical methods, as well as the widespread availability of devices enabling easy collection of point cloud data.
Among the technologies related to point clouds, applications for three-dimensional point cloud data are now attracting particular interest. It was already possible to obtain three-dimensional (3D) point cloud data in addition to flat image data, but the potential for using AI to analyze the details of 3D point clouds in new ways, for example to classify them by type or to detect solid objects, has given rise to a wide range of possible utilizations.
Furthermore, with the availability of LiDAR laser scanners, and the incorporation of LiDAR into devices such as smartphones and tablets, it is becoming much easier to obtain 3D point cloud data, and this encourages further expansion of the range of uses for 3D point cloud data.
This article explains ways that AI can be used for analysis of three-dimensional point clouds that have the potential to contribute to infrastructure in a wide variety of ways, presents example applications, etc.
INDEX
1. The role of point clouds in data science
1.1 Point clouds and their characteristics
1.2 Obtaining three-dimensional point cloud data: 3D scanning using LiDAR
2. Groundbreaking analysis methods for three-dimensional point cloud data: Analysis using AI
3. Examples of using LiDAR and three-dimensional point cloud data in combination
3.1 Self-driving vehicles: Implementation as an essential technology
3.2 Construction and civil engineering: Achieving faster situational assessment with BIM and GIS
3.3 Environmental monitoring and agriculture: More efficient overall management
< Column > Mechanism and characteristics of LiDAR
< Column > Data formats for expressing three-dimensional forms
1. The role of point clouds in data science
1.1 Point clouds and their characteristics
As mentioned above, a point cloud is a collection of points, in which the points represent coordinates. In the abstract, the concept can refer to a collection of points in a space with any number of dimensions, but the point clouds discussed in this article are collections of points in three-dimensional (3D) space that express 3D forms; in other words, 3D point clouds. Due to the flexibility of expression they enable, they are already used in many different fields.
Figure 1 shows an example of a 3D point cloud of a cup that was actually obtained as data. As can be seen in the enlarged detail shown in Figure 1, the 3D image of the cup actually consists of an aggregation of individual points.
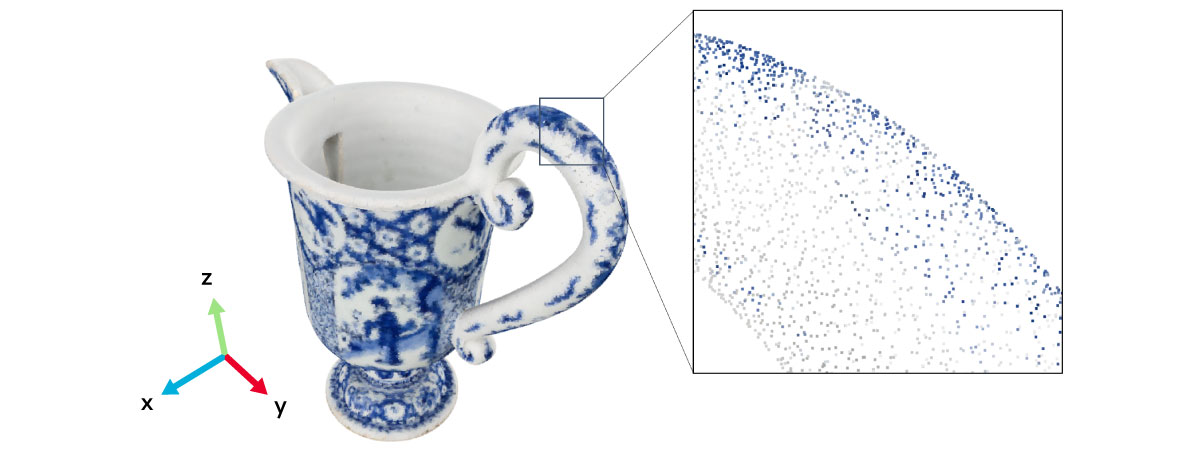
These 3D point clouds have the following important characteristics.
- The data can be used not only to represent location information in the form of coordinates, but can also be assigned information such as color, laser reflection intensity, and various properties (for example, temperature).
- The data can be obtained directly from sensors.
In the example shown in Figure 1, each point is assigned color information in addition to location information.
1.2 Obtaining three-dimensional point cloud data: 3D scanning using LiDAR
Light detection and ranging (LiDAR) is a widely used optical measurement technology for obtaining data by measuring the 3D point cloud of an object, as shown in Figure 1. (For more about LiDAR, refer to < Column > Mechanism and characteristics of LiDAR.) Laser scanners equipped with LiDAR include portable models that make it easy to obtain 3D point cloud data.
The 3D point cloud data obtained by LiDAR 3D scanning, if used unmodified in raw form in actual use cases requiring object recognition, for example, may cause problems that prevent successful recognition. Such cases can be dealt with by assigning information obtained by other sensors to the point cloud. This ability to assign additional information to the point cloud to accommodate a variety of uses illustrates the flexibility of representation possible using point cloud data, which is one of its most powerful features.
2. Groundbreaking analysis methods for three-dimensional point cloud data: Analysis using AI
The utilization of AI is one of the hottest topics nowadays with regard to the analysis of point cloud data. It makes possible groundbreaking analysis methods that were not previously available.
The following are some representative types of point cloud AI analysis technology.
- Classification
- Segmentation
- Object detection
Figure 2 shows an example of the application of these types of analysis to 3D point cloud data representing a plant. When applied to 3D point cloud data obtained with LiDAR or the like, these types of analysis can tell us "what" it is overall (classification) and recognize "where" the various parts of it are (segmentation and object detection).

In addition, preprocessing of the data is important for increasing precision when using 3D point cloud data in practical applications. Table 1 lists some representative types of preprocessing. It can be said that it is essential to apply such processing appropriately before performing AI analysis.
| Preprocessing | Description of processing |
|---|---|
| Upsampling | Data interpolation |
| Downsampling | Data decimation |
| Feature extraction | Extracting the shape characteristics of an object, such as corners |
| Registration | Alignment of objects |
| Denoising | Elimination of noise that could interfere with the above types of processing |
3. Examples of using LiDAR and three-dimensional point cloud data in combination
The acquisition of 3D point cloud data by LiDAR, which is expected to be adopted in even more fields moving forward, combined with AI analysis of the acquired data is already beginning to be explored in some fields, with a view toward practical use. Three representative examples are presented below.
3.1 Self-driving vehicles: Implementation as an essential technology
The potential market for self-driving vehicles is large, and this area is one where LiDAR is expected to be very widely adopted once LiDAR comes to be implemented in self-driving vehicles as an essential technology. LiDAR and 3D point cloud analysis are expected to play the role of "eyes" in self-driving vehicles. If LiDAR sensors mounted on the vehicle can obtain 3D point cloud data on the surrounding environment in real time, and obstacles on the roadway, pedestrians, road signs, etc. can be recognized with high accuracy based on the data, safe autonomous driving will have come a good way closer to becoming a reality. Some manufacturers of self-driving vehicles are currently making efforts to implement functions driven by LiDAR and 3D point cloud analysis, such as highly precise mapping and obstacle detection, in order to improve the tracking accuracy of self-driving vehicles.
3.2 Construction and civil engineering: Achieving faster situational assessment with BIM and GIS
In the construction and civil engineering fields, much attention is focused on the use of 3D point cloud data in applications such as building information modeling (BIM) and geographic information systems (GIS).
BIM is a method of constructing 3D geometric models that combine information on various attributes of buildings, such as the area of rooms, etc., and the performance of materials. By incorporating data obtained with LiDAR on conditions at the construction site into a BIM model, deviations from the plans can be identified immediately, contributing to greater work efficiency and prevention of errors. Measurements obtained using LiDAR-equipped drones can be used to implement 3D scanning of terrain and structures not accessible to persons, and since the use of BIM enables recognition of objects, the new technology could be used, for example, to obtain detailed assessments of the extent of damage when natural disasters occur.
A GIS collects, manages, analyses, and visualizes geographic information. It is anticipated that GIS will be used in fields such as construction and civil engineering to integrate geographic data from sites and help to boost design and construction efficiency. For example, this could enable detailed assessment of damage when natural disasters occur and be used to optimize evacuation routes. Since a GIS can effectively manage information on complex geographical features as digital data, this technology can assist in decision-making in many different fields.
3.3 Environmental monitoring and agriculture: More efficient overall management
Using LiDAR-equipped drones or tractors to obtain 3D point cloud data on woodlands or agricultural land makes it possible to assess the state of vegetation or crop growth in real time. For this reason, application is anticipated in the fields of smart agriculture and smart forestry to enable efficient management of farms and forests, early detection of harmful insects, and the like.
4. Summary
This article provided an overview of 3D point cloud data, which is currently the focus of much attention, and the application of AI analysis to such data. Section 3 presented examples of the combined use of these two technologies, but there are many other possible applications in areas including healthcare, entertainment, law enforcement, and manufacturing plant maintenance. We expect the adoption of these technologies to continue to expand to a wide variety of fields, ranging from those familiar in our everyday lives to industry.
Moving forward, we expect LiDAR technology for 3D point cloud data collection and peripheral technologies to continue to develop, and that devices incorporating such technologies will become less expensive. As services and solutions utilizing point clouds achieve wider adoption, they are likely to become a familiar aspect of our lives in the not too distant future.
< Column > Mechanism and characteristics of LiDAR
A LiDAR sensor emits laser light that strikes an object, and uses information on the difference between the reflected light and the incident light to measure the distance, form, and position of the object (Figure 3).
The main method used by LiDAR to measure distance is called time of flight (ToF). LiDAR utilizes the following two variants of ToF.
- dToF (direct time of flight): The time difference between the incident light and reflected light is used to measure the distance.
- iToF (indirect time of flight): The phase difference between the incident light and reflected light is used to measure the distance.
These two methods have different basic principles, meaning that each has its own strengths and weaknesses, and they are therefore used for quite different types of applications.
dToF | Strength | Ability to measure long distances; suitable for outdoor use |
|---|---|---|
Weakness | High device cost | |
iToF | Strength | Detector with high spatial resolution; comparatively low device cost |
Weakness | Not suitable for measuring long distances; not suitable for outdoor use |

In fact, there are optical measurement technologies other than LiDAR that are also capable of obtaining 3D data. Here we provide a comparison of LiDAR and other optical measurement technologies to make it easier to understand the features of LiDAR (Table 2).
LiDAR | Stereo cameras | Photogrammetry | ||
|---|---|---|---|---|
Measurement | Uses laser light Reconstructs | Uses two or Reconstructs | Uses one camera. Creates a | |
Data format | Three-dimensional | 4-channel image | Three-dimensional | |
Features | Measurement | Objects with Nontransparent | Objects illuminated Objects with | Objects illuminated Objects with sufficient |
Realtime | High | High | Low | |
As summarized in Table 2, LiDAR's features include high measurement resolution and accuracy, and robust ability to overcome various types of interference (such as rain, mist, or bright or dim ambient light). The reason why LiDAR is currently the focus of such interest in the field of self-driving vehicles is surely the above. At the present point in time, LiDAR-equipped devices for self-driving vehicles have issues related to cost and security vulnerabilities, but as prices fall and research to address the above vulnerabilities progresses, it is expected that the future will hold substantial room for growth.
< Column > Data formats for expressing three-dimensional forms
Among the data formats for expressing 3D forms, the above article focused only on 3D point clouds. But there are other ways of expressing 3D forms (Table 3). Each data format has its own advantages and disadvantages, so different formats tend to be used for different applications, or they may be used in combination with other data formats. When handling 3D data, it is necessary to confirm what data format is being used.
Point cloud | Voxels | Mesh | Depth image | |
|---|---|---|---|---|
Expression | Expresses an object | Uses a | Uses a collection | Expresses an object |
Advantages | Data in point cloud | Since the data is | It is possible to | The RGB-D format |
Disadvantages | If the density of Does not contain | The volume of data | The computational | The expression of |
Sample image |
|
|
|
|